Nurga koosinus on võrdne suhtega. Teravnurga siinus, koosinus, puutuja, kotangens
Mõisted siinus, koosinus, puutuja ja kotangens on trigonomeetria - matemaatika haru - peamised kategooriad ja on lahutamatult seotud nurga määratlusega. Selle matemaatilise teaduse omamine nõuab valemite ja teoreemide päheõppimist ja mõistmist, samuti arenenud ruumilist mõtlemist. Seetõttu valmistavad trigonomeetrilised arvutused koolilastele ja üliõpilastele sageli raskusi. Nende ületamiseks peaksite tutvuma trigonomeetriliste funktsioonide ja valemitega.
Mõisted trigonomeetrias
Trigonomeetria põhimõistete mõistmiseks peate esmalt otsustama, mis on täisnurkne kolmnurk ja nurk ringis ning miks kõik põhilised trigonomeetrilised arvutused on nendega seotud. Kolmnurk, mille üks nurkadest on 90 kraadi, on täisnurkne kolmnurk. Ajalooliselt kasutasid seda kuju sageli inimesed arhitektuuris, navigatsioonis, kunstis, astronoomias. Sellest lähtuvalt jõudsid inimesed selle joonise omadusi uurides ja analüüsides selle parameetrite vastavate suhete arvutamist.
Peamised täisnurksete kolmnurkadega seotud kategooriad on hüpotenuus ja jalad. Hüpotenuus on kolmnurga külg, mis on täisnurga vastas. Jalad on vastavalt ülejäänud kaks külge. Iga kolmnurga nurkade summa on alati 180 kraadi.
Sfääriline trigonomeetria on trigonomeetria osa, mida koolis ei õpita, kuid rakendusteadustes, nagu astronoomia ja geodeesia, kasutavad teadlased seda. Kolmnurga tunnus sfäärilises trigonomeetrias on see, et selle nurkade summa on alati suurem kui 180 kraadi.
Kolmnurga nurgad
 Täisnurkses kolmnurgas on nurga siinus soovitud nurga vastas oleva jala ja kolmnurga hüpotenuusi suhe. Vastavalt sellele on koosinus külgneva jala ja hüpotenuusi suhe. Mõlema väärtuse väärtus on alati väiksem kui üks, kuna hüpotenuus on alati pikem kui jalg.
Täisnurkses kolmnurgas on nurga siinus soovitud nurga vastas oleva jala ja kolmnurga hüpotenuusi suhe. Vastavalt sellele on koosinus külgneva jala ja hüpotenuusi suhe. Mõlema väärtuse väärtus on alati väiksem kui üks, kuna hüpotenuus on alati pikem kui jalg.
Nurga puutuja on väärtus, mis võrdub soovitud nurga vastasharu ja külgneva haru suhtega ehk siinus ja koosinus. Kootangens on omakorda soovitud nurga külgneva jala ja vastassuunalise kakteti suhe. Nurga kotangensi saab ka ühiku jagamisel puutuja väärtusega.
üksuse ring
Ühikringjoon geomeetrias on ring, mille raadius on võrdne ühega. Selline ring on konstrueeritud Descartes'i koordinaatsüsteemis, kusjuures ringi keskpunkt langeb kokku lähtepunktiga ja raadiusvektori algasend määratakse X-telje positiivse suuna järgi (abstsisstelg). Ringjoone igal punktil on kaks koordinaati: XX ja YY, st abstsissi ja ordinaadi koordinaadid. Valides ringil suvalise punkti XX tasapinnal ja langetades sellelt risti abstsissteljele, saame täisnurkse kolmnurga, mille moodustab valitud punkti raadius (tähistagem seda tähega C), mis on tõmmatud X-telg (lõikepunkti tähistatakse tähega G) ja abstsisstelljega segment alguspunkti (punkti tähistatakse tähega A) ja lõikepunkti G vahel. Saadud kolmnurk ACG on täisnurkne kolmnurk, mis on sisse kirjutatud ring, kus AG on hüpotenuus ning AC ja GC on jalad. Nurka ringjoone raadiuse AC ja abstsisstelje tähisega AG lõigu vahel määratleme kui α (alfa). Niisiis, cos α = AG/AC. Arvestades, et AC on ühikuringi raadius ja see on võrdne ühega, selgub, et cos α=AG. Samamoodi sin α=CG.
Lisaks on neid andmeid teades võimalik määrata ringi punkti C koordinaat, kuna cos α=AG, ja sin α=CG, mis tähendab, et punktil C on antud koordinaadid (cos α; sin α). Teades, et puutuja on võrdne siinuse ja koosinuse suhtega, saame kindlaks teha, et tg α \u003d y / x ja ctg α \u003d x / y. Arvestades nurki negatiivses koordinaatsüsteemis, võib arvutada, et mõne nurga siinus- ja koosinusväärtused võivad olla negatiivsed.
Arvutused ja põhivalemid

Trigonomeetriliste funktsioonide väärtused
Arvestades trigonomeetriliste funktsioonide olemust ühikringi kaudu, saame nende funktsioonide väärtused tuletada mõne nurga jaoks. Väärtused on loetletud allolevas tabelis.
Lihtsamad trigonomeetrilised identiteedid
Võrrandeid, milles trigonomeetrilise funktsiooni märgi all on tundmatu väärtus, nimetatakse trigonomeetrilisteks. Identiteedid väärtusega sin x = α, k on mis tahes täisarv:
- sin x = 0, x = πk.
- 2. sin x \u003d 1, x \u003d π / 2 + 2πk.
- sin x \u003d -1, x \u003d -π / 2 + 2πk.
- sin x = a, |a| > 1, lahendusi pole.
- sin x = a, |a| ≦ 1, x = (-1)^k * arcsin α + πk.
Identiteedid väärtusega cos x = a, kus k on mis tahes täisarv:
- cos x = 0, x = π/2 + πk.
- cos x = 1, x = 2πk.
- cos x \u003d -1, x \u003d π + 2πk.
- cos x = a, |a| > 1, lahendusi pole.
- cos x = a, |a| ≦ 1, х = ±arccos α + 2πk.
Identiteedid väärtusega tg x = a, kus k on mis tahes täisarv:
- tg x = 0, x = π/2 + πk.
- tg x \u003d a, x \u003d arctg α + πk.
Identiteedid väärtusega ctg x = a, kus k on mis tahes täisarv:
- ctg x = 0, x = π/2 + πk.
- ctg x \u003d a, x \u003d arcctg α + πk.
Valatud valemid
See konstantsete valemite kategooria tähistab meetodeid, mille abil saate liikuda vormi trigonomeetrilistest funktsioonidest argumendi funktsioonide juurde, st teisendada mis tahes väärtusega nurga siinus, koosinus, puutuja ja kotangens vastavateks nurga indikaatoriteks. intervall 0 kuni 90 kraadi arvutuste suurema mugavuse huvides.
Nurga siinuse vähendamise funktsioonide valemid näevad välja järgmised:
- sin(900 - α) = α;
- sin(900 + α) = cos α;
- sin(1800 - α) = sin α;
- sin(1800 + α) = -sin α;
- sin(2700 - α) = -cos α;
- sin(2700 + α) = -cos α;
- sin(3600 - α) = -sin α;
- sin(3600 + α) = sin α.
Nurga koosinuse jaoks:
- cos(900 - α) = sin α;
- cos(900 + α) = -sin α;
- cos(1800 - α) = -cos α;
- cos(1800 + α) = -cos α;
- cos(2700 - α) = -sin α;
- cos(2700 + α) = sin α;
- cos(3600 - α) = cos α;
- cos(3600 + α) = cos α.
Ülaltoodud valemite kasutamine on võimalik kahe reegli alusel. Esiteks, kui nurka saab esitada väärtusena (π/2 ± a) või (3π/2 ± a), muutub funktsiooni väärtus:
- patust cos;
- cos-ist pattu;
- tg-st ctg-ni;
- ctg-st tg-ni.
Funktsiooni väärtus jääb muutumatuks, kui nurka saab esitada kui (π ± a) või (2π ± a).
Teiseks ei muutu redutseeritud funktsiooni märk: kui see oli algselt positiivne, siis nii see ka jääb. Sama kehtib ka negatiivsete funktsioonide kohta.
Lisamise valemid
Need valemid väljendavad kahe pöördenurga summa ja erinevuse siinuse, koosinuse, puutuja ja kotangensi väärtusi nende trigonomeetriliste funktsioonide kaudu. Nurki tähistatakse tavaliselt kui α ja β.
Valemid näevad välja sellised:
- sin(α ± β) = sin α * cos β ± cos α * sin.
- cos(α ± β) = cos α * cos β ∓ sin α * sin.
- tan(α ± β) = (tan α ± tan β) / (1 ∓ tan α * tan β).
- ctg(α ± β) = (-1 ± ctg α * ctg β) / (ctg α ± ctg β).
Need valemid kehtivad mis tahes nurga α ja β korral.
Topelt- ja kolmiknurga valemid
Topelt- ja kolmiknurga trigonomeetrilised valemid on valemid, mis seovad vastavalt nurkade 2α ja 3α funktsioonid nurga α trigonomeetriliste funktsioonidega. Tuletatud liitmisvalemitest:
- sin2α = 2sinα*cosα.
- cos2α = 1 - 2sin^2α.
- tg2α = 2tgα / (1 - tg^2 α).
- sin3α = 3sinα - 4sin^3α.
- cos3α = 4cos^3α - 3cosα.
- tg3α = (3tgα - tg^3α) / (1-tg^2α).
Üleminek summalt tootele
Arvestades, et 2sinx*cosy = sin(x+y) + sin(x-y), saame seda valemit lihtsustades identiteedi sinα + sinβ = 2sin(α + β)/2 * cos(α − β)/2. Samamoodi sinα - sinβ = 2sin(α - β)/2 * cos(α + β)/2; cosα + cosβ = 2cos(α + β)/2 * cos(α − β)/2; cosα - cosβ = 2sin(α + β)/2 * sin(α − β)/2; tgα + tgβ = sin(α + β) / cosα * cosβ; tgα - tgβ = sin(α - β) / cosα * cosβ; cosα + sinα = √2sin(π/4 ∓ α) = √2cos(π/4 ± α).
Üleminek tootelt summale
Need valemid tulenevad summa korrutisele ülemineku tunnustest:
- sinα * sinβ = 1/2*;
- cosα * cosβ = 1/2*;
- sinα * cosβ = 1/2*.
Vähendamise valemid
Nendes identiteetides saab siinuse ja koosinuse ruut- ja kuupastmeid väljendada mitme nurga esimese astme siinuse ja koosinuse kaudu:
- sin^2 α = (1 - cos2α)/2;
- cos^2α = (1 + cos2α)/2;
- sin^3 α = (3 * sinα - sin3α)/4;
- cos^3 α = (3 * cosα + cos3α)/4;
- sin^4 α = (3 - 4cos2α + cos4α)/8;
- cos^4 α = (3 + 4cos2α + cos4α)/8.
Universaalne asendus
Universaalsed trigonomeetrilised asendusvalemid väljendavad trigonomeetrilisi funktsioone poolnurga puutuja kaudu.
- sin x \u003d (2tgx / 2) * (1 + tg ^ 2 x / 2), samas kui x \u003d π + 2πn;
- cos x = (1 - tg^2 x/2) / (1 + tg^2 x/2), kus x = π + 2πn;
- tg x \u003d (2tgx / 2) / (1 - tg ^ 2 x / 2), kus x \u003d π + 2πn;
- ctg x \u003d (1 - tg ^ 2 x / 2) / (2tgx / 2), samas kui x \u003d π + 2πn.
Erijuhtumid
Lihtsamate erijuhud trigonomeetrilised võrrandid on toodud allpool (k on mis tahes täisarv).
Privaatne sinu jaoks:
| sin x väärtus | x väärtus |
|---|---|
| 0 | pk |
| 1 | π/2 + 2πk |
| -1 | -π/2 + 2πk |
| 1/2 | π/6 + 2πk või 5π/6 + 2πk |
| -1/2 | -π/6 + 2πk või -5π/6 + 2πk |
| √2/2 | π/4 + 2πk või 3π/4 + 2πk |
| -√2/2 | -π/4 + 2πk või -3π/4 + 2πk |
| √3/2 | π/3 + 2πk või 2π/3 + 2πk |
| -√3/2 | -π/3 + 2πk või -2π/3 + 2πk |
Koosinuse jagatised:
| cos x väärtus | x väärtus |
|---|---|
| 0 | π/2 + 2πk |
| 1 | 2πk |
| -1 | 2 + 2πk |
| 1/2 | ±π/3 + 2πk |
| -1/2 | ±2π/3 + 2πk |
| √2/2 | ±π/4 + 2πk |
| -√2/2 | ±3π/4 + 2πk |
| √3/2 | ±π/6 + 2πk |
| -√3/2 | ±5π/6 + 2πk |
Privaatne puutuja jaoks:
| tg x väärtus | x väärtus |
|---|---|
| 0 | pk |
| 1 | π/4 + πk |
| -1 | -π/4 + πk |
| √3/3 | π/6 + πk |
| -√3/3 | -π/6 + πk |
| √3 | π/3 + πk |
| -√3 | -π/3 + πk |
Kotangentsed jagatised:
| ctg x väärtus | x väärtus |
|---|---|
| 0 | π/2 + πk |
| 1 | π/4 + πk |
| -1 | -π/4 + πk |
| √3 | π/6 + πk |
| -√3 | -π/3 + πk |
| √3/3 | π/3 + πk |
| -√3/3 | -π/3 + πk |
Teoreemid
Siinuse teoreem
Teoreemil on kaks versiooni – lihtne ja laiendatud. Lihtsiini teoreem: a/sin α = b/sin β = c/sin γ. Sel juhul on a, b, c kolmnurga küljed ja α, β, γ vastavalt vastasnurgad.
Laiendatud siinusteoreem suvalise kolmnurga jaoks: a/sin α = b/sin β = c/sin γ = 2R. Selles identiteedis tähistab R selle ringi raadiust, millesse antud kolmnurk on kantud.
Koosinusteoreem
Identiteet kuvatakse järgmiselt: a^2 = b^2 + c^2 - 2*b*c*cos α. Valemis on a, b, c kolmnurga küljed ja α on külje a vastasnurk.
Tangensiteoreem
Valem väljendab seost kahe nurga puutujate ja nende vastas olevate külgede pikkuse vahel. Küljed on tähistatud a, b, c ja vastavad vastasnurgad on α, β, γ. Puutujateoreemi valem: (a - b) / (a+b) = tg((α - β)/2) / tg((α + β)/2).
Kotangensi teoreem
Seob kolmnurga sisse kirjutatud ringi raadiuse selle külgede pikkusega. Kui a, b, c on kolmnurga küljed ja A, B, C on vastavalt nende vastasnurgad, r on sisse kirjutatud ringi raadius ja p on kolmnurga poolperimeeter, on järgmised identiteedid hoia:
- ctg A/2 = (p-a)/r;
- ctg B/2 = (p-b)/r;
- ctg C/2 = (p-c)/r.
Rakendused

Trigonomeetria ei ole ainult teoreetiline teadus, mis on seotud matemaatiliste valemitega. Selle omadusi, teoreeme ja reegleid kasutavad praktikas erinevad inimtegevuse harud – astronoomia, õhu- ja merenavigatsioon, muusikateooria, geodeesia, keemia, akustika, optika, elektroonika, arhitektuur, majandus, masinaehitus, mõõtetööd, arvutigraafika, kartograafia, okeanograafia ja paljud teised.
Siinus, koosinus, puutuja ja kotangens on trigonomeetria põhimõisted, millega saab matemaatiliselt väljendada kolmnurga nurkade ja külgede pikkuste vahelisi seoseid ning identiteetide, teoreemide ja reeglite kaudu leida soovitud suurused.
Trigonomeetria on matemaatika haru, mis uurib trigonomeetrilisi funktsioone ja nende kasutamist geomeetrias. Trigonomeetria areng algas Vana-Kreeka päevil. Keskajal andsid Lähis-Ida ja India teadlased selle teaduse arengusse olulise panuse.
See artikkel räägib sellest põhimõisted ja trigonomeetria määratlused. Selles käsitletakse peamiste trigonomeetriliste funktsioonide määratlusi: siinus, koosinus, puutuja ja kotangens. Nende tähendust geomeetria kontekstis selgitatakse ja illustreeritakse.
Algselt väljendati trigonomeetriliste funktsioonide määratlusi, mille argumendiks on nurk, täisnurkse kolmnurga külgede suhte kaudu.
Trigonomeetriliste funktsioonide definitsioonid
Nurga siinus (sin α) on selle nurga vastas oleva jala ja hüpotenuusi suhe.
Nurga koosinus (cos α) on külgneva jala ja hüpotenuusi suhe.
Nurga puutuja (t g α) on vastasjala ja külgneva jala suhe.
Nurga kotangens (c t g α) on külgneva jala ja vastassuunalise jala suhe.
Need definitsioonid on antud täisnurkse kolmnurga teravnurga kohta!
Toome näite.
Kolmnurgas ABC täisnurgaga C on nurga A siinus võrdne jala BC ja hüpotenuusi AB suhtega.
Siinuse, koosinuse, puutuja ja kotangensi definitsioonid võimaldavad arvutada nende funktsioonide väärtused kolmnurga külgede teadaolevate pikkuste põhjal.
Oluline meeles pidada!
Siinus- ja koosinusväärtuste vahemik: -1 kuni 1. Teisisõnu, siinus ja koosinus võtavad väärtused vahemikus -1 kuni 1. Tangensi ja koosinuse väärtuste vahemik on kogu arvurida, st need funktsioonid võivad võtta mis tahes väärtuse.
Eespool toodud määratlused viitavad teravnurkadele. Trigonomeetrias võetakse kasutusele pöördenurga mõiste, mille väärtust erinevalt teravnurgast ei piira raamid vahemikus 0 kuni 90 kraadi Pöördenurka kraadides või radiaanides väljendatakse mis tahes reaalarvuga alates - ∞ kuni + ∞.
Selles kontekstis saab määratleda suvalise suurusega nurga siinuse, koosinuse, puutuja ja kotangensi. Kujutage ette ühikringi, mille keskpunkt on Descartes'i koordinaatsüsteemi alguspunktis.

Algpunkt A koordinaatidega (1 , 0) pöörleb ümber ühikuringi keskpunkti mingi nurga α võrra ja läheb punkti A 1 . Määratlus antakse punkti A 1 (x, y) koordinaatide kaudu.
Pöörlemisnurga siinus (sinus).
Pöörlemisnurga α siinus on punkti A 1 (x, y) ordinaat. sinα = y
Pöörlemisnurga koosinus (cos).
Pöördenurga α koosinus on punkti A 1 (x, y) abstsiss. cos α = x
Pöörlemisnurga puutuja (tg).
Pöördenurga α puutuja on punkti A 1 (x, y) ordinaadi ja selle abstsissi suhe. t g α = y x
Pöörlemisnurga kotangents (ctg).
Pöördenurga α kotangens on punkti A 1 (x, y) abstsissi suhe selle ordinaadiga. c t g α = x y
Siinus ja koosinus on määratletud mis tahes pöördenurga jaoks. See on loogiline, sest pöördejärgse punkti abstsissi ja ordinaati saab määrata mis tahes nurga all. Tangensi ja kotangensi puhul on olukord erinev. Puutujat ei määrata, kui punkt pärast pöörlemist läheb null-abstsissiga punkti (0 , 1) ja (0 , - 1). Sellistel juhtudel pole puutuja t g α = y x avaldisel lihtsalt mõtet, kuna see sisaldab nulliga jagamist. Sarnane on olukord kotangensiga. Erinevus seisneb selles, et kotangenti ei määrata juhtudel, kui punkti ordinaat kaob.
Oluline meeles pidada!
Siinus ja koosinus on määratletud mis tahes nurga α jaoks.
Puutuja on määratletud kõigi nurkade jaoks, välja arvatud α = 90° + 180° k , k ∈ Z (α = π 2 + π k , k ∈ Z)
Kootangens on määratletud kõigi nurkade jaoks, välja arvatud α = 180° k, k ∈ Z (α = π k, k ∈ Z)
Otsustades praktilisi näiteidära ütle "pöördenurga α siinus". Sõnad "pöördenurk" on lihtsalt välja jäetud, mis annab mõista, et kontekstist on juba selge, mis on kaalul.
Numbrid
Aga arvu siinuse, koosinuse, puutuja ja kotangensi, mitte pöördenurga määratlus?
Arvu siinus, koosinus, puutuja, kotangens
Arvu siinus, koosinus, puutuja ja kotangens t kutsutakse arv, mis on vastavalt võrdne siinuse, koosinuse, puutuja ja kotangensiga in t radiaan.
Näiteks siinus 10 π võrdub pöördenurga siinusega 10 π rad.
Arvu siinuse, koosinuse, puutuja ja kotangensi defineerimisel on veel üks lähenemine. Vaatleme seda üksikasjalikumalt.
Igaüks tegelik arv tühikringi punkt viiakse vastavusse ristkülikukujulise Descartes'i koordinaatsüsteemi alguspunkti keskpunktiga. Siinus, koosinus, puutuja ja kotangens on määratletud selle punkti koordinaatidena.
Ringjoone alguspunktiks on punkt A koordinaatidega (1 , 0).
positiivne arv t
Negatiivne arv t vastab punktile, kuhu alguspunkt liigub, kui see liigub ümber ringi vastupäeva ja läbib tee t .
Nüüd, kui seos arvu ja ringi punkti vahel on loodud, jätkame siinuse, koosinuse, puutuja ja kotangensi definitsiooniga.
Siinus (patt) arvust t
Arvu siinus t- arvule vastava ühikringi punkti ordinaat t. sin t = y
Koosinus (cos) t-st
Arvu koosinus t- arvule vastava ühikringi punkti abstsiss t. cos t = x
t puutuja (tg).
Arvu puutuja t- arvule vastava ühikringi punkti ordinaadi ja abstsissi suhe t. t g t = y x = sin t cos t
Viimased määratlused on kooskõlas käesoleva jaotise alguses antud määratlusega ega ole sellega vastuolus. Punkt arvule vastaval ringil t, langeb kokku punktiga, milleni lähtepunkt liigub pärast nurga pööramist t radiaan.
Nurga- ja arvargumendi trigonomeetrilised funktsioonid
Nurga α iga väärtus vastab selle nurga siinuse ja koosinuse teatud väärtusele. Nii nagu kõik nurgad α peale α = 90 ° + 180 ° · k, vastab k ∈ Z (α = π 2 + π · k , k ∈ Z) puutuja teatud väärtusele. Kootangens, nagu eespool mainitud, on defineeritud kõigi α jaoks, välja arvatud α = 180 ° k , k ∈ Z (α = π k , k ∈ Z).
Võime öelda, et sin α , cos α , t g α , c t g α on nurga alfa funktsioonid ehk nurgaargumendi funktsioonid.
Samamoodi võib arvulise argumendi funktsioonidena rääkida siinusest, koosinusest, puutujast ja kotangensist. Iga reaalne arv t vastab arvu siinuse või koosinuse kindlale väärtusele t. Kõik arvud peale π 2 + π · k , k ∈ Z vastavad puutuja väärtusele. Kootangens on samamoodi defineeritud kõigi arvude jaoks, välja arvatud π · k , k ∈ Z.
Trigonomeetria põhifunktsioonid
Siinus, koosinus, puutuja ja kotangens on trigonomeetrilised põhifunktsioonid.
Tavaliselt on kontekstist selge, millise trigonomeetrilise funktsiooni argumendiga (nurkargumendiga või numbriargumendiga) tegemist on.
Pöördume tagasi definitsioonide alguses olevate andmete ja nurga alfa juurde, mis jääb vahemikku 0 kuni 90 kraadi. Trigonomeetrilised määratlused siinus, koosinus, puutuja ja kotangens on täielikult kooskõlas täisnurkse kolmnurga külgede suhteid kasutades antud geomeetriliste definitsioonidega. Näitame seda.

Võtke ühikring, mille keskpunkt on ristkülikukujuline Descartes'i koordinaatsüsteem. Pöörame alguspunkti A (1, 0) kuni 90 kraadise nurga võrra ja joonistame saadud punktist A 1 (x, y) risti x-teljega. Saadud täisnurkses kolmnurgas on nurk A 1 O H võrdne pöördenurgaga α, jala pikkus O H võrdub punkti A abstsissiga 1 (x, y) . Nurga vastas oleva jala pikkus on võrdne punkti A 1 (x, y) ordinaadiga ja hüpotenuusi pikkus on võrdne ühega, kuna see on ühikuringi raadius.
Vastavalt geomeetria definitsioonile on nurga α siinus võrdne vastasjala ja hüpotenuusi suhtega.
sin α \u003d A 1 H O A 1 \u003d y 1 \u003d y
See tähendab, et täisnurkse kolmnurga teravnurga siinuse määratlus kuvasuhte kaudu on samaväärne pöördenurga α siinuse määratlusega, kusjuures alfa asub vahemikus 0 kuni 90 kraadi.
Samamoodi saab definitsioonide vastavust näidata koosinuse, puutuja ja kotangensi jaoks.

Kui märkate tekstis viga, tõstke see esile ja vajutage Ctrl+Enter
Ma arvan, et sa väärid rohkemat. Siin on minu trigonomeetria võti:
- Joonistage kuppel, sein ja lagi
- Trigonomeetrilised funktsioonid pole midagi muud kui nende kolme vormi protsent.
Siinuse ja koosinuse metafoor: kuppel
Kolmnurkade endi vaatamise asemel kujutlege neid tegutsemas, leides mõne konkreetse näite tegelikust elust.
Kujutage ette, et olete keset kuplit ja soovite riputada üles filmiprojektori ekraani. Näitate näpuga kuplile mingi "x" nurga all ja sellesse punkti tuleks riputada ekraan.
Nurk, millele osutate, määrab:
- siinus(x) = sin(x) = ekraani kõrgus (põrandast kupli kinnituspunkt)
- koosinus(x) = cos(x) = kaugus sinust ekraanini (korruse kaupa)
- hüpotenuus, kaugus sinust ekraani ülaossa, alati sama, võrdne kupli raadiusega
Kas soovite, et ekraan oleks võimalikult suur? Riputage see otse enda kohale.
Kas soovite, et ekraan ripuks maksimaalselt? pikamaa sinult? Riputage see otse risti. Selles asendis on ekraani kõrgus null ja see ripub nii kaugele taha, kui soovite.
Kõrgus ja kaugus ekraanist on pöördvõrdelised: mida lähemal ekraan ripub, seda kõrgem on selle kõrgus.
Siinus ja koosinus on protsendid
Kahjuks ei selgitanud keegi minu õpinguaastatel mulle, et trigonomeetrilised funktsioonid siinus ja koosinus pole muud kui protsendid. Nende väärtused on vahemikus +100% kuni 0 kuni -100% või positiivsest maksimumist nulli kuni negatiivse maksimumini.
Oletame, et maksin 14 rubla maksu. Sa ei tea, kui palju see on. Aga kui ütlete, et maksin 95% maksu, siis saate aru, et mind lihtsalt nülgiti nagu kleepuvat.
Absoluutne kõrgus ei tähenda midagi. Aga kui siinus on 0,95, siis ma saan aru, et teler ripub peaaegu su kupli otsas. Üsna varsti saavutab see kupli keskel oma maksimumkõrguse ja hakkab seejärel uuesti langema.
Kuidas me saame seda protsenti arvutada? Väga lihtne: jagage praegune ekraani kõrgus maksimaalse võimalikuga (kupli raadius, mida nimetatakse ka hüpotenuusiks).
Sellepärast meile öeldakse, et "koosinus = vastasjalg / hüpotenuus". Seda kõike protsendi saamiseks! Parim viis siinuse defineerimiseks on "praeguse kõrguse protsent maksimaalsest võimalikust". (Siinus muutub negatiivseks, kui teie nurk osutab "maa alla". Koosinus muutub negatiivseks, kui nurk osutab teie taga asuvale kuplipunktile.)
Lihtsustame arvutusi, eeldades, et oleme ühikringi keskpunktis (raadius = 1). Võime jagamise vahele jätta ja võtta siinuse, mis võrdub kõrgusega.
Iga ring on tegelikult üksik, suurendatud või vähendatud skaalal soovitud suuruseni. Seega määrake ühikuringi seosed ja rakendage tulemusi oma konkreetsele ringi suurusele.
Katse: võtke mis tahes nurk ja vaadake, mitu protsenti kõrgusest laiusest kuvatakse:
Siinuse väärtuse kasvu graafik ei ole lihtsalt sirge. Esimesed 45 kraadi katavad 70% kõrgusest ja viimased 10 kraadi (80° kuni 90°) vaid 2%.
See teeb teile selgemaks: kui lähete ringi, tõusete 0 ° juures peaaegu vertikaalselt, kuid kupli ülaosale lähenedes muutub kõrgus üha vähem.
Tangent ja sekant. Sein
Ühel päeval ehitas naaber müüri otse selg oma kupli juurde. Nutsin teie aknavaadet ja head edasimüügihinda!
Kuid kas selles olukorras on võimalik kuidagi võita?

Muidugi jah. Mis siis, kui riputaksime filmiekraani otse naabri seinale? Sihid nurka (x) ja saad:
- tan(x) = tan(x) = ekraani kõrgus seinal
- kaugus sinust seinani: 1 (see on sinu kupli raadius, sein ei liigu sinust kuhugi, eks?)
- secant(x) = sec(x) = "redeli pikkus" sinust kupli keskel seistes kuni rippuva ekraani ülaossa
Täpsustame paar asja puutuja ehk ekraani kõrguse kohta.
- see algab nullist ja võib tõusta lõpmatult kõrgele. Saate sirutada ekraani seinal aina kõrgemale, et saada oma lemmikfilmi vaatamiseks lihtsalt lõputu lõuend! (Sellise tohutu jaoks peate muidugi kulutama palju raha).
- tangens on lihtsalt siinuse suurendatud versioon! Ja kuigi siinuse kasv aeglustub, kui liigute kupli tipu poole, siis puutuja kasvab jätkuvalt!
Sekansul on ka millega kiidelda:
- sekant algab 1-st (redel on põrandal, sinust eemal seina poole) ja hakkab sealt üles minema
- Sekant on alati pikem kui puutuja. Kaldredel, mille külge ekraani riputate, peab olema pikem kui ekraan ise, eks? (Ebareaalsetes suurustes, kui ekraan on niiiii pikk ja redel tuleb asetada peaaegu vertikaalselt, on nende suurused peaaegu samad. Aga ka siis on sekant veidi pikem).
Pidage meeles, et väärtused on protsenti. Kui otsustate ekraani riputada 50-kraadise nurga all, on tan(50)=1,19. Teie ekraan on 19% suurem kui kaugus seinast (kupli raadius).
(Sisestage x=0 ja testige oma intuitsiooni – tan(0) = 0 ja sec(0) = 1.)
Kootangens ja kosekant. Lagi
Uskumatu, et teie naaber on nüüd otsustanud ehitada teie kupli kohale lae. (Mis temaga on? Ilmselt ei taha ta, et sa teda piiluksid, kui ta alasti õues ringi kõnnib...)
Noh, on aeg ehitada väljapääs katusele ja rääkida naabriga. Valite kaldenurga ja alustate ehitamist:

- vertikaalne kaugus katuse väljalaskeava ja põranda vahel on alati 1 (kupli raadius)
- kotangent(x) = cot(x) = kupli ülaosa ja väljumispunkti vaheline kaugus
- kosekant(x) = csc(x) = teie tee pikkus katusele
Puutuja ja sekant kirjeldavad seina, samas kui kootangens ja koossekant kirjeldavad põrandat.
Meie intuitiivsed järeldused on seekord sarnased eelmiste järeldustega:
- Kui võtate nurga 0°, kestab teie katusele pääsemine igavesti, kuna see ei ulatu kunagi laeni. Probleem.
- Lühima "trepi" katusele saate, kui ehitate selle põranda suhtes 90-kraadise nurga all. Kootangens võrdub 0-ga (me ei liigu üldse mööda katust, väljume rangelt risti) ja kosekant on võrdne 1-ga (“redeli pikkus” on minimaalne).
Visualiseerige ühendused
Kui kõik kolm korpust joonistatakse kupli-seina-põranda kombinatsioonina, saadakse järgmine:

Vau, see kõik on sama kolmnurk, suurendatud, et ulatuda seina ja laeni. Meil on vertikaalsed küljed (siinus, puutuja), horisontaalsed küljed (koosinus, kotangents) ja “hüpotenused” (sekant, kosekant). (Nooltest näete, kui kaugele iga element ulatub. Koossekant on kogu kaugus sinust katuseni).
Natuke maagiat. Kõigil kolmnurkadel on samad võrdsused:

Pythagorase teoreemist (a 2 + b 2 = c 2) näeme, kuidas on ühendatud iga kolmnurga küljed. Lisaks peavad kõrguse ja laiuse suhted olema kõigi kolmnurkade puhul samad. (Lihtsalt astuge tagasi suurimast kolmnurgast väiksema poole. Jah, suurus on muutunud, kuid külgede proportsioonid jäävad samaks).
Teades, milline külg igas kolmnurgas on 1 (kupli raadius), saame kergesti arvutada, et "sin/cos = tan/1".
Olen alati püüdnud neid fakte lihtsa visualiseerimise abil meelde jätta. Pildil on need sõltuvused selgelt näha ja aru saada, kust need tulevad. See tehnika on palju parem kui kuivvalemite meeldejätmine.
Ärge unustage teisi nurki
Shh… Pole vaja jääda rippuma ühele graafikule, arvates, et puutuja on alati väiksem kui 1. Kui suurendate nurka, võite jõuda laeni ilma seinani jõudmata:

Pythagorase ühendused töötavad alati, kuid suhtelised suurused võivad olla erinevad.
(Tõenäoliselt olete märganud, et siinuse ja koosinuse suhe on alati väikseim, kuna need on suletud kuplisse.)
Kokkuvõtteks: mida me peame meeles pidama?
Enamikule meist ma ütleksin, et sellest piisab:
- trigonomeetria selgitab matemaatiliste objektide, nagu ringid ja korduvad intervallid, anatoomiat
- kupli/seina/katuse analoogia näitab seost erinevate trigonomeetriliste funktsioonide vahel
- trigonomeetriliste funktsioonide tulemuseks on protsendid, mida me oma stsenaariumile rakendame.
Te ei pea pähe õppima selliseid valemeid nagu 1 2 + võrevoodi 2 = csc 2 . Need sobivad ainult rumalateks testideks, kus fakti teadmine esitatakse selle mõistmisena. Võtke minut aega kupli, seina ja katuse kujulise poolringi joonistamiseks, allkirjastage elemendid ja kõik valemid küsitakse teilt paberil.
Rakendus: pöördfunktsioonid
Iga trigonomeetriline funktsioon võtab sisendiks nurga ja tagastab tulemuse protsentides. sin(30) = 0,5. See tähendab, et 30-kraadine nurk võtab 50% maksimaalsest kõrgusest.
Trigonomeetriline pöördfunktsioon on kirjutatud kui sin -1 või arcsin (“arksiin”). Levinud on ka asin sisse kirjutamine erinevaid keeli programmeerimine.
Kui meie kõrgus on 25% kupli kõrgusest, siis milline on meie nurk?
Meie proportsioonide tabelist leiate suhtarvu, kus sekant jagatakse 1-ga. Näiteks sekant 1-ga (hüpotenuus ja horisontaalne) võrdub 1-ga jagatud koosinusega:

Oletame, et meie sekant on 3,5, st. 350% ühiku ringi raadiusest. Millisele seina kaldenurgale see väärtus vastab?
Lisa: Mõned näited
Näide: Leia nurga x siinus.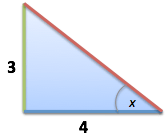
Igav ülesanne. Keerutagem banaalne "leia siinus" sõnadega "Mis on kõrgus protsendina maksimumist (hüpotenuus)?".
Esiteks pange tähele, et kolmnurk on pööratud. Selles pole midagi halba. Kolmnurgal on ka kõrgus, see on joonisel roheliselt näidatud.
Millega võrdub hüpotenuus? Pythagorase teoreemi järgi teame, et:
3 2 + 4 2 = hüpotenuus 2 25 = hüpotenuus 2 5 = hüpotenuus
Hästi! Siinus on kolmnurga pikima külje ehk hüpotenuusi kõrguse protsent. Meie näites on siinus 3/5 või 0,60.
Muidugi võime minna mitut moodi. Nüüd teame, et siinus on 0,60 ja saame lihtsalt arssinuse leida:
Asin(0,6)=36,9
Ja siin on veel üks lähenemine. Pange tähele, et kolmnurk on "seinaga näost näkku", seega saame siinuse asemel kasutada puutujat. Kõrgus on 3, kaugus seinast on 4, seega puutuja on ¾ ehk 75%. Protsendilt nurga juurde liikumiseks saame kasutada kaartangensi:
Tan = 3/4 = 0,75 atan(0,75) = 36,9 Näide: kas ujute kaldale?

Olete paadis ja teil on piisavalt kütust, et sõita 2 km kaugusele. Nüüd olete rannikust 0,25 km kaugusel. Millise maksimaalse nurga all kalda suhtes saab sinna ujuda, et kütust jätkuks? Täiendus ülesande tingimusele: meil on ainult kaarekoosinusväärtuste tabel.
Mis meil on? Rannajoont saab kujutada meie kuulsas kolmnurgas "seinana" ja seina külge kinnitatud "trepi pikkust" võib kujutada maksimaalse võimaliku kaugusena paadiga kaldast (2 km). Ilmub sekant.
Esiteks peate lülituma protsentidele. Meil on 2 / 0,25 = 8, mis tähendab, et suudame kalda (või seina) sirge distantsi ujuda 8 korda.
Tekib küsimus "Mis on sekant 8?". Kuid me ei saa sellele vastata, kuna meil on ainult kaarekoosinused.
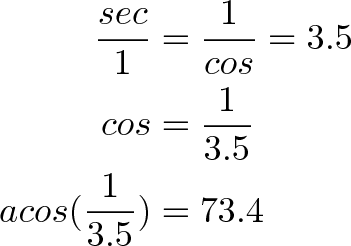
Kasutame oma varem tuletatud sõltuvusi, et vastendada sekant koosinusega: "sec/1 = 1/cos"

8 sekant on võrdne ⅛ koosinusega. Nurk, mille koosinus on ⅛, on acos(1/8) = 82,8. Ja see on suurim nurk, mida saame etteantud kütusekogusega paadis lubada.
Pole paha, eks? Ilma kuppel-seina-lae analoogiata oleksin valemite ja arvutuste hunnikus segaduses. Probleemi visualiseerimine lihtsustab oluliselt lahenduse otsimist, lisaks on huvitav näha, milline trigonomeetriline funktsioon lõpuks aitab.
Mõelge iga ülesande puhul järgmiselt: kas mind huvitab kuppel (sin/cos), sein (tan/sec) või lagi (voodi/csc)?
Ja trigonomeetria muutub palju meeldivamaks. Lihtsad arvutused teile!
Trigonomeetria on matemaatika haru, mis uurib trigonomeetrilisi funktsioone ja nende kasutamist praktikas. Nende funktsioonide hulka kuuluvad sinus, koosinus, puutuja ja kotangens.
Siinus on trigonomeetriline funktsioon, vastasjala suuruse ja hüpotenuusi suuruse suhe.
Siinus trigonomeetrias.
Nagu eespool mainitud, on siinus otseselt seotud trigonomeetria ja trigonomeetriliste funktsioonidega. Selle funktsiooni määrab
- aidake arvutada nurka eeldusel, et kolmnurga külgede mõõtmed on teada;
- aidake välja arvutada kolmnurga külje suurust eeldusel, et nurk on teada.
Tuleb meeles pidada, et siinuse väärtus on kolmnurga mis tahes suuruse korral alati sama, kuna siinus ei ole mõõt, vaid suhe.
Sellest tulenevalt, et mitte arvutada seda konstantset väärtust konkreetse ülesande iga lahenduse jaoks, loodi spetsiaalsed trigonomeetrilised tabelid. Nendes on siinuste, koosinuste, puutujate ja kotangentide väärtused juba arvutatud ja fikseeritud. Tavaliselt on need tabelid toodud algebra ja geomeetria õpikute lendlehel. Neid võib leida ka Internetist.
Siinus geomeetrias.
Geomeetria nõuab seetõttu visualiseerimist, et praktikas mõista, mis on nurga siinus, peate joonistama täisnurgaga kolmnurga.
Oletame, et täisnurga moodustavad küljed on nimetatud a, c, vastupidine nurk X.
Tavaliselt on ülesannetes märgitud külgede pikkus. Ütleme a = 3, b = 4. Sel juhul näeb kuvasuhe välja nagu ¾. Veelgi enam, kui pikendame kolmnurga teravnurgaga külgnevaid külgi X, siis küljed suurenevad A Ja V, ja hüpotenuus on täisnurkse kolmnurga kolmas külg, mis ei ole aluse suhtes täisnurga all. Nüüd võib kolmnurga külgi nimetada erinevalt, näiteks: m, n, k.
Selle modifikatsiooniga töötas trigonomeetria seadus: kolmnurga külgede pikkused muutusid, kuid nende suhe mitte.
Asjaolu, et kui muuta kolmnurga külgede pikkust nii mitu korda kui soovite ja nurga x väärtust säilitades, jääb selle külgede suhe ikkagi muutumatuks, märkasid muistsed teadlased. Meie puhul võib külgede pikkus muutuda järgmiselt: a / b \u003d ¾, kui külg on pikendatud A kuni 6 cm ja V- kuni 8 cm saame: m/n = 6/8 = 3/4.
Täisnurkse kolmnurga külgede suhteid selles osas nimetatakse:
- nurga x siinus on vastasjala ja hüpotenuusi suhe: sinx = a/c;
- nurga x koosinus on külgneva jala ja hüpotenuusi suhe: cosx = w/s;
- nurga x puutuja on vastasjala ja külgneva jala suhe: tgx \u003d a / b;
- nurga x kotangens on külgneva jala ja vastassuunalise jala suhe: ctgx \u003d in / a.
Mis on nurga siinus, koosinus, puutuja, kotangens, aitab teil mõista täisnurkset kolmnurka.
Kuidas nimetatakse täisnurkse kolmnurga külgi? See on õige, hüpotenuus ja jalad: hüpotenuus on külg, mis asub täisnurga vastas (meie näites on see külg \ (AC \) ); jalad on kaks ülejäänud külge \ (AB \) ja \ (BC \) (need, mis külgnevad täisnurk), pealegi, kui arvestada jalgu nurga \ (BC \) suhtes, siis jalg \ (AB \) on külgnev jalg ja jalg \ (BC \) on vastupidine. Niisiis, vastame nüüd küsimusele: mis on nurga siinus, koosinus, puutuja ja kotangens?
Nurga siinus- see on vastupidise (kaugema) jala ja hüpotenuusi suhe.
Meie kolmnurgas:
\[ \sin \beta =\dfrac(BC)(AC) \]
Nurga koosinus- see on külgneva (lähedase) jala ja hüpotenuusi suhe.
Meie kolmnurgas:
\[ \cos \beta =\dfrac(AB)(AC) \]
Nurga puutuja- see on vastas (kauge) jala ja külgneva (lähedase) suhe.
Meie kolmnurgas:
\[ tg\beta =\dfrac(BC)(AB) \]
Nurga kotangents- see on külgneva (lähedase) jala ja vastupidise (kauge) suhe.
Meie kolmnurgas:
\[ ctg\beta =\dfrac(AB)(BC) \]
Need määratlused on vajalikud mäleta! Et oleks lihtsam meeles pidada, milline jalg millega jagada, peate sellest selgelt aru saama puutuja Ja kotangent istuvad ainult jalad ja hüpotenuus ilmub ainult sisse sinus Ja koosinus. Ja siis saab välja mõelda assotsiatsioonide ahela. Näiteks see:
koosinus→puudutus→puudutus→külgnev;
Kotangent → puudutus → puudutus → külgnev.
Kõigepealt tuleb meeles pidada, et siinus, koosinus, puutuja ja kotangens kui kolmnurga külgede suhtarvud ei sõltu nende külgede pikkustest (ühe nurga all). Ei usu? Seejärel veenduge pilti vaadates:

Vaatleme näiteks nurga \(\beta \) koosinust. Definitsiooni järgi kolmnurgast \(ABC \) : \(\cos \beta =\dfrac(AB)(AC)=\dfrac(4)(6)=\dfrac(2)(3) \), kuid nurga \(\beta \) koosinuse saame arvutada kolmnurgast \(AHI \) : \(\cos \beta =\dfrac(AH)(AI)=\dfrac(6)(9)=\dfrac(2)(3) \). Näete, külgede pikkused on erinevad, kuid ühe nurga koosinuse väärtus on sama. Seega sõltuvad siinuse, koosinuse, puutuja ja kotangensi väärtused ainult nurga suurusest.
Kui saate definitsioonidest aru, siis jätkake ja parandage need!
Alloleval joonisel näidatud kolmnurga \(ABC \) jaoks leiame \(\sin \ \alpha ,\ \cos \ \alpha ,\ tg\ \alpha ,\ ctg\ \alpha \).

\(\begin(massiiv)(l)\sin \ \alpha =\dfrac(4)(5)=0,8\\\cos \ \alpha =\dfrac(3)(5)=0,6\\ tg\ \alpha =\dfrac(4)(3)\\ctg\ \alpha =\dfrac(3)(4)=0,75\end(massiivi) \)
Noh, kas sa said aru? Seejärel proovige ise: arvutage sama nurga \(\beta \) jaoks.
Vastused: \(\sin \ \beta =0,6;\ \cos \ \beta =0,8;\ tg\ \beta =0,75;\ ctg\ \beta =\dfrac(4)(3) \).
Ühik (trigonomeetriline) ring
Mõistes kraadi ja radiaani mõisteid, käsitlesime ringi, mille raadius on võrdne \ (1 \) . Sellist ringi nimetatakse vallaline. See on väga kasulik trigonomeetria uurimisel. Seetõttu peatume sellel veidi üksikasjalikumalt.

Nagu näete, on see ring ehitatud Descartes'i koordinaatsüsteemis. Ringjoone raadius on võrdne ühega, samal ajal kui ringi keskpunkt asub lähtepunktis, on raadiuse vektori algpositsioon fikseeritud piki \(x \) telje positiivset suunda (meie näites on see raadius \(AB \) ).
Iga punkt ringil vastab kahele numbrile: koordinaat piki telge \(x \) ja koordinaat piki telge \(y \) . Mis need koordinaatide numbrid on? Ja üleüldse, mis on neil selle teemaga pistmist? Selleks pidage meeles vaadeldavat täisnurkset kolmnurka. Ülaltoodud joonisel näete kahte tervet täisnurkset kolmnurka. Vaatleme kolmnurka \(ACG \) . See on ristkülikukujuline, kuna \(CG \) on risti teljega \(x \).
Mis on \(\cos \ \alpha \) kolmnurgast \(ACG \)? See on õige \(\cos \ \alpha =\dfrac(AG)(AC) \). Pealegi teame, et \(AC \) on ühikuringi raadius, seega \(AC=1 \) . Asendage see väärtus meie koosinusvalemiga. See juhtub järgmiselt.
\(\cos \ \alpha =\dfrac(AG)(AC)=\dfrac(AG)(1)=AG \).
Ja mis on \(\sin \ \alpha \) kolmnurgast \(ACG \)? No muidugi, \(\sin \alpha =\dfrac(CG)(AC) \)! Asendage selles valemis raadiuse \ (AC \) väärtus ja saate:
\(\sin \alpha =\dfrac(CG)(AC)=\dfrac(CG)(1)=CG \)
Niisiis, kas saate mulle öelda, mis on ringile kuuluva punkti \(C \) koordinaadid? No mitte kuidagi? Aga mis siis, kui mõistate, et \(\cos \ \alpha \) ja \(\sin \alpha \) on vaid numbrid? Millisele koordinaadile vastab \(\cos \alpha \)? Muidugi, koordinaat \(x \) ! Ja millisele koordinaadile vastab \(\sin \alpha \)? See on õige, \(y \) koordinaat! Nii et point \(C(x;y)=C(\cos \alpha ;\sin \alpha) \).

Mis on siis \(tg \alpha \) ja \(ctg \alpha \)? See on õige, kasutame sobivaid puutuja ja kotangensi definitsioone ja saame selle \(tg \alpha =\dfrac(\sin \alpha )(\cos \alpha )=\dfrac(y)(x) \), A \(ctg \alpha =\dfrac(\cos \alpha )(\sin \alpha )=\dfrac(x)(y) \).
Mis siis, kui nurk on suurem? Siin näiteks nagu sellel pildil:

Mis on selles näites muutunud? Selgitame välja. Selleks pöördume uuesti täisnurkse kolmnurga poole. Vaatleme täisnurkset kolmnurka \(((A)_(1))((C)_(1))G \) : nurk (külgneb nurgaga \(\beta \) ). Mis on siinuse, koosinuse, puutuja ja kotangensi väärtus nurga jaoks \(((C)_(1))((A)_(1))G=180()^\circ -\beta \ \)? See on õige, me järgime vastavaid trigonomeetriliste funktsioonide määratlusi:
\(\begin(massiivi)(l)\sin \angle ((C)_(1))((A)_(1))G=\dfrac(((C)_(1))G)(( (A)_(1))((C)_(1)))=\dfrac(((C)_(1))G)(1)=((C)_(1))G=y; \\\cos \angle ((C)_(1))((A)_(1))G=\dfrac(((A)_(1))G)(((A)_(1)) ((C)_(1)))=\dfrac(((A)_(1))G)(1)=((A)_(1))G=x;\\tg\nurk ((C) )_(1))((A)_(1))G=\dfrac(((C)_(1))G)(((A)_(1))G)=\dfrac(y)( x);\\ctg\nurk ((C)_(1))((A)_(1))G=\dfrac(((A)_(1))G)(((C)_(1 ))G)=\dfrac(x)(y)\end(massiivi) \)
No nagu näha, vastab nurga siinuse väärtus ikkagi koordinaadile \ (y \) ; nurga koosinuse väärtus - koordinaat \ (x \) ; ning puutuja ja kotangensi väärtused vastavatele suhetele. Seega on need seosed rakendatavad raadiusvektori mis tahes pöörete korral.
Juba mainitud, et raadiusvektori algpositsioon on piki telje \(x \) positiivset suunda. Siiani oleme seda vektorit pööranud vastupäeva, aga mis juhtub, kui pöörame seda päripäeva? Ei midagi erakordset, saate ka teatud suurusega nurga, kuid ainult see on negatiivne. Seega raadiusvektorit vastupäeva pöörates saame positiivsed nurgad ja päripäeva pöörates - negatiivne.
Seega teame, et kogu raadiusvektori pööre ümber ringi on \(360()^\circ \) või \(2\pi \) . Kas raadiuse vektorit on võimalik pöörata \(390()^\circ \) või \(-1140()^\circ \) võrra? No muidugi saab! Esimesel juhul \(390()^\circ =360()^\circ +30()^\circ \), seega teeb raadiuse vektor ühe täispöörde ja peatub \(30()^\circ \) või \(\dfrac(\pi )(6) \) juures.
Teisel juhul \(-1140()^\circ =-360()^\circ \cdot 3-60()^\circ \), see tähendab, et raadiuse vektor teeb kolm täielikku pööret ja peatub asendis \(-60()^\circ \) või \(-\dfrac(\pi )(3) \) .
Seega võime ülaltoodud näidete põhjal järeldada, et nurgad, mis erinevad \(360()^\circ \cdot m \) või \(2\pi \cdot m \) võrra (kus \(m \) on mis tahes täisarv ) vastavad raadiusvektori samale asukohale.
Allolev joonis näitab nurka \(\beta =-60()^\circ \) . Sama pilt vastab nurgale \(-420()^\circ ,-780()^\circ ,\ 300()^\circ ,660()^\circ \) jne. Seda loetelu võib lõputult jätkata. Kõik need nurgad saab kirjutada üldvalemiga \(\beta +360()^\circ \cdot m \) või \(\beta +2\pi \cdot m \) (kus \(m \) on mis tahes täisarv)
\(\begin(massiiv)(l)-420()^\circ =-60+360\cdot (-1);\\-780()^\circ =-60+360\cdot (-2); \\300()^\circ =-60+360\cdot 1;\\660()^\circ =-60+360\cdot 2.\end(massiivi) \)

Nüüd, teades põhiliste trigonomeetriliste funktsioonide määratlusi ja kasutades ühikuringi, proovige vastata, millega väärtused on võrdsed:
\(\begin(massiivi)(l)\sin \ 90()^\circ =?\\\cos \ 90()^\circ =?\\\text(tg)\ 90()^\circ =? \\\text(ctg)\ 90()^\circ =?\\\sin \ 180()^\circ =\sin \ \pi =?\\\cos \ 180()^\circ =\cos \ \pi =?\\\tekst(tg)\ 180()^\circ =\text(tg)\ \pi =?\\\tekst(ctg)\ 180()^\circ =\text(ctg)\ \pi =?\\\sin \ 270()^\circ =?\\\cos \ 270()^\circ =?\\\text(tg)\ 270()^\circ =?\\\tekst (ctg)\ 270()^\circ =?\\\sin \ 360()^\circ =?\\\cos \ 360()^\circ =?\\\text(tg)\ 360()^ \circ =?\\\text(ctg)\ 360()^\circ =?\\\sin \ 450()^\circ =?\\\cos \ 450()^\circ =?\\\tekst (tg)\ 450()^\circ =?\\\text(ctg)\ 450()^\circ =?\end(massiiv) \)
Siin on ühikuring, mis aitab teid:

Kas on raskusi? Siis mõtleme välja. Nii et me teame, et:
\(\begin(massiiv)(l)\sin \alpha =y;\\cos\alpha =x;\\tg\alpha =\dfrac(y)(x);\\ctg\alpha =\dfrac(x )(y).\end(massiiv) \)
Siit määrame nurga teatud mõõtmetele vastavate punktide koordinaadid. Noh, alustame järjekorras: nurk sisse \(90()^\circ =\dfrac(\pi )(2) \) vastab punktile koordinaatidega \(\left(0;1 \right) \) , seega:
\(\sin 90()^\circ =y=1 \) ;
\(\cos 90()^\circ =x=0 \) ;
\(\text(tg)\ 90()^\circ =\dfrac(y)(x)=\dfrac(1)(0)\Paremnool \text(tg)\ 90()^\circ \)- ei eksisteeri;
\(\text(ctg)\ 90()^\circ =\dfrac(x)(y)=\dfrac(0)(1)=0 \).
Lisaks saame samast loogikast kinni pidades teada, et nurgad on sees \(180()^\circ ,\ 270()^\circ ,\ 360()^\circ ,\ 450()^\circ (=360()^\circ +90()^\circ)\ \ ) vastavad koordinaatidega punktidele \(\left(-1;0 \right),\text( )\left(0;-1 \right),\text( )\left(1;0 \right),\text( )\left(0 ;1 \paremal) \), vastavalt. Seda teades on lihtne määrata trigonomeetriliste funktsioonide väärtusi vastavates punktides. Proovige kõigepealt ise ja seejärel kontrollige vastuseid.
Vastused:
\(\displaystyle \sin \ 180()^\circ =\sin \ \pi =0 \)
\(\displaystyle \cos \ 180()^\circ =\cos \ \pi =-1 \)
\(\text(tg)\ 180()^\circ =\text(tg)\ \pi =\dfrac(0)(-1)=0 \)
\(\text(ctg)\ 180()^\circ =\text(ctg)\ \pi =\dfrac(-1)(0)\Paremnool \text(ctg)\ \pi \)- ei eksisteeri
\(\sin \ 270()^\circ =-1 \)
\(\cos \ 270()^\circ =0 \)
\(\text(tg)\ 270()^\circ =\dfrac(-1)(0)\Paremnool \text(tg)\ 270()^\circ \)- ei eksisteeri
\(\text(ctg)\ 270()^\circ =\dfrac(0)(-1)=0 \)
\(\sin \ 360()^\circ =0 \)
\(\cos \ 360()^\circ =1 \)
\(\text(tg)\ 360()^\circ =\dfrac(0)(1)=0 \)
\(\text(ctg)\ 360()^\circ =\dfrac(1)(0)\Paremnool \text(ctg)\ 2\pi \)- ei eksisteeri
\(\sin \ 450()^\circ =\sin \ \left(360()^\circ +90()^\circ \right)=\sin \ 90()^\circ =1 \)
\(\cos \ 450()^\circ =\cos \ \left(360()^\circ +90()^\circ \right)=\cos \ 90()^\circ =0 \)
\(\text(tg)\ 450()^\circ =\text(tg)\ \left(360()^\circ +90()^\circ \right)=\text(tg)\ 90() ^\circ =\dfrac(1)(0)\Paremnool \text(tg)\ 450()^\circ \)- ei eksisteeri
\(\text(ctg)\ 450()^\circ =\text(ctg)\left(360()^\circ +90()^\circ \right)=\text(ctg)\ 90()^ \circ =\dfrac(0)(1)=0 \).
Seega saame teha järgmise tabeli:

Kõiki neid väärtusi pole vaja meeles pidada. Piisab meeles pidada vastavust ühikuringi punktide koordinaatide ja trigonomeetriliste funktsioonide väärtuste vahel:
\(\left. \begin(massiiv)(l)\sin \alpha =y;\\cos \alpha =x;\\tg \alpha =\dfrac(y)(x);\\ctg \alpha =\ dfrac(x)(y).\end(massiiv) \right\)\ \text(Vaja meeles pidada või väljastada!! \) !}
Ja siin on ja nurkade trigonomeetriliste funktsioonide väärtused \(30()^\circ =\dfrac(\pi )(6),\ 45()^\circ =\dfrac(\pi )(4) \) allolevas tabelis toodud, peate meeles pidama:

Pole vaja karta, nüüd näitame ühte näidet vastavate väärtuste üsna lihtsast meeldejätmisest:

Selle meetodi kasutamiseks on oluline meeles pidada kõigi kolme nurga mõõtmise siinusväärtusi ( \(30()^\circ =\dfrac(\pi )(6),\ 45()^\circ =\dfrac(\pi )(4),\ 60()^\circ =\dfrac(\pi )(3) \)), samuti nurga puutuja väärtus \(30()^\circ \) . Teades neid \(4\) väärtusi, on kogu tabeli taastamine üsna lihtne - koosinusväärtused kantakse üle noolte järgi, see tähendab:
\(\begin(massiivi)(l)\sin 30()^\circ =\cos \ 60()^\circ =\dfrac(1)(2)\ \ \\\sin 45()^\circ = \cos \ 45()^\circ =\dfrac(\sqrt(2))(2)\\\sin 60()^\circ =\cos \ 30()^\circ =\dfrac(\sqrt(3) ))(2)\ \end(massiiv) \)
\(\text(tg)\ 30()^\circ \ =\dfrac(1)(\sqrt(3)) \), seda teades on võimalik väärtused taastada \(\text(tg)\ 45()^\circ , \text(tg)\ 60()^\circ \). Lugeja "\(1 \)" vastab \(\text(tg)\ 45()^\circ \ \) ja nimetaja "\(\sqrt(\text(3)) \)" vastab \ (\tekst (tg)\ 60()^\circ \ \) . Kotangentide väärtused kantakse üle vastavalt joonisel näidatud nooltele. Kui saate sellest aru ja mäletate skeemi nooltega, piisab, kui mäletate tabelist ainult \(4 \) väärtusi.
Ringjoone punkti koordinaadid
Kas ringil on võimalik leida punkti (selle koordinaate), teades ringi keskpunkti koordinaate, raadiust ja pöördenurka? No muidugi saab! Toome välja üldine valem punkti koordinaatide leidmiseks. Näiteks siin on meil selline ring:

See punkt on meile antud \(K(((x)_(0));((y)_(0)))=K(3;2) \) on ringi keskpunkt. Ringjoone raadius on \(1,5 \) . On vaja leida punkti \(P \) koordinaadid, mis saadakse punkti \(O \) pööramisel \(\delta \) kraadi võrra.
Nagu jooniselt näha, vastab punkti \ (P \) koordinaat \ (x \) lõigu \ pikkusele (TP=UQ=UK+KQ \) . Lõigu \ (UK \) pikkus vastab ringi keskpunkti koordinaadile \ (x \), see tähendab, et see on võrdne \ (3 \) . Lõigu \(KQ \) pikkust saab väljendada koosinuse definitsiooni abil:
\(\cos \ \delta =\dfrac(KQ)(KP)=\dfrac(KQ)(r)\Paremnool KQ=r\cdot \cos \ \delta \).
Siis on meil see punkti \(P \) koordinaat \(x=((x)_(0))+r\cdot \cos \ \delta =3+1,5\cdot \cos \ \delta \).
Sama loogika järgi leiame punkti \(P\) y-koordinaadi väärtuse. Seega
\(y=((y)_(0))+r\cdot \sin \ \delta =2+1,5\cdot \sin \delta \).
Nii et sisse üldine vaade punkti koordinaadid määratakse valemitega:
\(\begin(massiiv)(l)x=((x)_(0))+r\cdot \cos \ \delta \\y=((y)_(0))+r\cdot \sin \ \delta \end(massiiv) \), Kus
\(((x)_(0)),((y)_(0)) \) - ringi keskpunkti koordinaadid,
\(r\) - ringi raadius,
\(\delta \) - vektori raadiuse pöördenurk.
Nagu näete, on vaadeldava ühikuringi puhul need valemid oluliselt vähenenud, kuna keskpunkti koordinaadid on null ja raadius on võrdne ühega:
\(\begin(massiiv)(l)x=((x)_(0))+r\cdot \cos \ \delta =0+1\cdot \cos \ \delta =\cos \ \delta \\y =((y)_(0))+r\cdot \sin \ \delta =0+1\cdot \sin \ \delta =\sin \ \delta \end(massiivi) \)
Javascript on teie brauseris keelatud.Arvutuste tegemiseks peavad ActiveX-juhtelemendid olema lubatud!