Calcul graphique de la trajectoire du navire, tenant compte de la dérive du vent. Le calcul graphique et sa précision Solution du problème inverse
CALCUL GRAPHIQUE DE LA VOIE DU NAVIRE. Afin de juger de la sécurité de la navigation, de naviguer dans l'environnement et de choisir les bons caps pour la poursuite du mouvement, le navigateur doit à tout moment connaître la position de son navire. Pour cela, il dirige pavé de navigation.Avant que le navire ne parte en voyage, sous la direction du capitaine, ils étudient les conditions de navigation pour l'ensemble du passage à venir à l'aide de cartes et d'aides à la navigation. Sur la base de ces données, effectuez pose préliminaire. Cependant, il ne donne qu'une idée générale des conditions de transition. A partir du moment où vous embarquez pour un voyage, le choix final des parcours et tous les facteurs pris en compte sont déterminés par la situation de navigation spécifique. Le vol s'effectue donc joint exécutif. Il comprend l'estime, les calculs et la cartographie, les calculs de manœuvre pour éviter d'autres navires.
compte appelé la comptabilisation continue des éléments du mouvement du navire (vitesse et direction) et des effets des forces externes afin de déterminer les coordonnées du navire (lieu calculé) sans observer les repères côtiers et les corps célestes (observations). Cette comptabilisation est effectuée sur la base des valeurs du vecteur cap, vitesse et dérive du navire. Le point de départ de l'estime sur la carte est déterminé par le capitaine. La position exacte du navire obtenue immédiatement après avoir quitté la zone d'eau du port, un phare flottant, une bouée de réception, etc. peut être considérée comme un tel point. Ses coordonnées sont enregistrées dans le journal de bord. Au moment où la pose exécutive commence, vous devez allumer le journal, déterminer la correction de la boussole par alignement ou d'une autre manière.
MAINTIEN DU NUMÉRO LORS DE LA NAGE SANS DÉRIVE ET SANS COURANT. Lorsque vous naviguez sans dérive ni courant, la trajectoire du navire sur la carte coïncide avec la ligne IC, par conséquent, le mouvement du navire sur la carte est pris en compte le long des lignes IC, le long desquelles les distances parcourues par le navire le long du journal sont tracées, compte tenu de son coefficient CL. A partir du point de départ sur la carte, une ligne du premier parcours est tracée. Le CI extrait de la carte est transféré au CC, sur lequel ils sont placés selon le compas magnétique. Sur la carte au-dessus de la ligne IR, le cap de la boussole et sa correction sont inscrits. Distance parcourue par parcours Sl déterminé par log :
Sl \u003d Cl (ol2 - ol1); (Où ol2 ol1 CL- facteur de décalage).
A l'instar de la CI, dans les cas indiqués ci-dessous, le calcul de la revanche du navire est appliqué, c'est-à-dire la place calculée en fonction de la route et de la navigation. Si la navigation est effectuée près de la côte, des points dénombrables sont marqués toutes les heures, en pleine mer - à la fin de la montre. De plus, une place comptable est appliquée aux points de début et de fin des virages, lors du changement de vitesse, lors de la réception des observations. Près de la position du navire, sous forme de fraction, le moment est enregistré selon l'horloge du navire avec une précision de 1 min (T) et la lecture du décalage avec une précision de 0,1 mille (ol). (Voir Figure 31).
Dans des conditions de navigation réelles, il existe trois options principales qui déterminent les pratiques de navigation à l'estime appropriées pour un yacht :
- naviguer dans des conditions de plein vent constant ;
- naviguer dans des conditions de vent contraire stable ;
- naviguer dans des vents instables en force et en direction.
Dans le premier cas, le yacht est généralement conduit le long de la ligne du chemin tracé lors de la pose préliminaire. Les termes de calcul sont ici favorables. Dans le second cas, le pointage s'effectue par rapport au cap général, alors que la trajectoire réelle posée sur chaque point ne coïncide pas avec la pose préliminaire. Si le bord n'est pas trop raide, alors le barreur maintient avec précision un cap donné, ce qui simplifie le calcul et augmente sa précision. Dans ces conditions, la durée des virements dépend de l'angle du virement (l'angle entre la route générale et la trajectoire du voilier). Si les angles des virements droit et gauche sont égaux, leur durée est la même et le virement peut être symétrique. Sinon, l'estime et la pose de la voie sont effectuées sur chaque bord privé en fonction des données de l'instrument. S'il n'y a pas de décalage, il est recommandé d'évaluer la vitesse sur chaque bord.
Lors d'un virement de bord, il peut arriver que le barreur, sous la direction du capitaine du yacht, lorsqu'il sort face au vent, ne fasse pas attention à la boussole. Ici, à des intervalles de temps petits mais égaux (15 à 30 minutes), le QC moyen et l'IC correspondant sont déterminés et enregistrés, selon lesquels les données obtenues par le décalage ou la vitesse sont mises de côté. Par vent instable, le barreur ne fixe pas le cap, mais se fixe pour tâche de guider la voile à la recherche du vent, en respectant au plus près le cap général. Parfois dans une telle situation, en fonction des indications locales et des prévisions météo, il peut être avantageux de s'écarter du cap général pour obtenir plus tôt un plein vent régulier (par exemple, une brise au large). Dans tous ces cas, dans un souci d'estime, tous les virages sont enregistrés sur le voilier et sur chaque bord (au début et à la fin du bord, c'est obligatoire) avec une certaine fréquence (1 à 2 fois par heure, selon sur conditions), des données sur le mouvement du navire (temps, cap, vitesse, lecture de décalage). Ces enregistrements sont traités en faisant la moyenne du cap et de la vitesse de chaque bord, puis tracés sur la carte.
La pratique montre que la précision du calcul dans de telles conditions augmente avec la discrétion croissante des observations. Les erreurs d'approximation des sections courbes de navigation par des lignes droites seront insignifiantes par rapport aux autres erreurs.
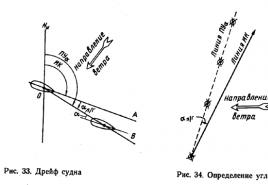
LA DÉRIVE DU NAVIRE. En navigation dérivante ( "un") s'appelle la dérive du navire par rapport à la ligne de route sous l'action combinée du vent et des vagues provoquées par celui-ci. Lors de la dérive, le navire se déplace par rapport à l'eau sous l'action conjuguée des machines du navire et du vent. La ligne de son mouvement réel (OV), appelée ligne de route du navire pendant la dérive, ne coïncide pas avec la route du navire (OA). (Voir Figure 33). Lorsque la piste est décalée vers la droite de DP navire (vent soufflant à bâbord) un un signe plus (+) est attribué, et lorsqu'il est décalé vers la gauche (le vent souffle à tribord), un signe moins (-) est attribué. Le rapport entre l'angle de route tenant compte de la dérive ( PUa), IR Et un:
PUa \u003d IR + a; IR \u003d PUa - un; a = PUa - IR

L'angle de dérive peut être déterminé en comparant la trajectoire réelle du navire obtenue à partir des observations avec IR. En suivant en vue de la côte, un certain nombre d'observations de navigation fiables sont faites. En reliant les points observés, ils obtiennent la ligne du mouvement réel du navire, c'est-à-dire la ligne de route lors de la dérive PUa(Fig. 34). L'angle entre la ligne de voie et la ligne tracée sur la carte IR correspond à l'angle de dérive. L'angle de dérive trouvé avec son signe est pris en compte dans le calcul ultérieur. S'il y a un courant dans la zone de navigation, l'angle de dérive résultant sera le résultat de l'impact sur le navire non seulement du vent, mais également du courant.
COMPTE DE LA DÉRIVE DANS LE CALCUL. Si le navire dérive, lors du traçage, la ligne de la trajectoire du navire pendant la dérive est tracée sur la carte. Ils écrivent dessus CQ, correction du compas et angle de dérive pris en compte un avec votre signe. La distance parcourue le long du décalage est tracée le long de la ligne de chemin Sl. On croit qu'à un
Sl \u003d Cl (ol2 - ol1); (Où ol2- compte à rebours du décalage à l'emplacement du navire, ol1- compte à rebours du décalage au point de départ, CL- facteur de décalage).
Si le navigateur n'est pas sûr de la précision de l'angle de dérive, alors afin de contrôler la sécurité de la navigation, en plus de la ligne de trace pendant la dérive, il est recommandé de tracer une ligne sur la carte IR. Ces deux lignes doivent être exemptes d'obstacles sous-marins. Le calcul est effectué uniquement le long de la ligne de voie, le long de laquelle le navire se déplace.
COURANTS MARINS. Les courants marins sont les mouvements horizontaux de grandes masses d'eau. Le flux est caractérisé par ses éléments : direction et vitesse. Direction actuelle ct indiquent en degrés dans un compte circulaire ou rhumbs et sont réglés en fonction du point de l'horizon vers lequel le courant est dirigé. Vitesse actuelle Vermont mesurée en nœuds, et ses petites vitesses - en miles par jour. Selon la nature du flux, ils sont classés en constantes, dont les éléments ne changent presque pas d'une année sur l'autre, périodiques, dont les éléments changent selon une certaine loi, et temporaires (aléatoire), dont les éléments peut changer radicalement. En pratique, le navigateur est le plus souvent confronté à des courants constants et périodiques (de marée). Les informations sur les éléments des courants permanents et de marée sont placées dans les instructions nautiques, les atlas des courants et sur les cartes. Dans le même temps, les valeurs moyennes des éléments de flux sont indiquées, ce qui peut différer considérablement des valeurs réelles. Le mouvement du navire par rapport au sol lorsqu'il nage dans le courant est déterminé par les facteurs suivants (Fig. 36).

Sous l'action des moteurs des navires, le navire se déplace par rapport à l'eau dans le sens de sa DP, c'est-à-dire les lignes du vrai cours de l'arthrose. La vitesse du navire sur l'eau est la vitesse VI montré par le décalage. En même temps, avec toute la masse d'eau, le navire est emporté par rapport au sol dans le sens de l'écoulement de l'OD avec la vitesse de l'écoulement Vermont. En conséquence, par rapport au sol, le navire se déplace le long de l'OB résultant à une vitesse appelée vitesse réelle du navire V. Où DP le bateau reste parallèle à la ligne IR. La ligne OB, le long de laquelle le navire se déplace sous l'action conjuguée des machines du navire et du courant, est appelée ligne de route du navire sur le courant. La position de la trace par rapport au vrai méridien est déterminée par l'angle NOB, appelé angle de cap sur le courant. PU. Coin "" , comprise entre la ligne de route vraie du navire OA et la ligne de route OB, est appelée angle de dérive. Lorsque le navire est démoli à droite de son DP(le courant est dirigé vers la gauche) le signe "+" est attribué, et lors de la dérive vers la gauche, le signe "-" est attribué. Dépendance entre ( PU), IR Et :
PU \u003d IR +; IR \u003d PU -; = PU - IR
NOMBRE QUAND FLOTTANT SUR LE COURANT. Lorsque vous naviguez dans un courant constant, la ligne de trajectoire du navire est tracée sur la carte, le long de laquelle il se déplace réellement par rapport au sol. Au-dessus de la ligne de chemin est inscrit CQ, correction de la boussole et angle de dérive avec son propre signe. Pour les calculs auxiliaires, une ligne est également tracée avec une ligne fine IR, le long duquel les distances sont tracées Sl, passé par le navire par rapport à l'eau selon les indications du log. Points reçus sur la ligne IR, sont transférés dans le sens de l'écoulement vers la ligne de voie (Fig. 37). Les points dénombrables sur la ligne de piste sont marqués avec des lectures de temps et de décalage, et aux points correspondants sur la ligne de parcours - uniquement des lectures de décalage. Des points de traversée, d'ouverture et de masquage d'amers sont appliqués à la ligne de chemin (Fig. 38).


CALCUL AVEC COMPTABILISATION COMMUNE DE LA DÉRIVE ET DU COURANT. Considérons le cas où le navire se déplace par rapport au sol sous l'action combinée des moteurs du navire, du vent et du courant. Pour maintenir le calcul sur la carte, tracez la ligne de la trajectoire du navire pendant la dérive et le courant et inscrivez CQ, correction de la boussole et angle de dérive total
c = une + .
De plus, pour les calculs auxiliaires, une trace de dérive est également tracée sur la carte, le long de laquelle la navigation du navire le long du journal est reportée. Sl. Chaque point sur la trajectoire de dérive correspond à un point sur la ligne du mouvement réel du navire. Ces points sont reliés entre eux par le vecteur flux. Graphiquement, les tâches liées à la recherche de la ligne de voie sur la carte pendant la dérive et le courant, la vitesse réelle V et angle de dérive total Avec selon donné CQ, VI, un, et des éléments du flux, dessinant un lieu numéroté, précalculant le temps et ol au moment de l'arrivée à un point donné, trouvant une traversée du repère, ils décident de la même manière qu'en nageant dans le courant, mais toutes les constructions auxiliaires sont faites sur la ligne de voie lors de la dérive, en remplaçant la ligne IR.
ESTIMATIONS DE L'EXACTITUDE DU NOMBRE. Sous l'effet d'erreurs non comptabilisées, la trajectoire réelle du navire et la distance parcourue par celui-ci (voyage) ne correspondront pas à celles prises en compte lors du calcul sur la carte, et la position réelle du navire ne correspondra pas à celui calculé. Pour un jugement approximatif sur les erreurs de calcul, vous pouvez utiliser les données suivantes, qui reflètent l'expérience généralisée accumulée de la navigation et les études réalisées. La durée du voyage (heures) correspond à l'erreur quadratique moyenne radiale, % depuis S:
Jusqu'à 3 heures - 10 % ; 3-6 heures - 9 % ; 6-10h - 8% ; 10-14h - 7% ; 14-18h - 6% ; 18-23h - 5% ; 23-25h - 4% ; plus de 35 heures - 3%.
Lors de la pose de la route du navire sur la carte à une certaine distance des dangers de navigation, il est nécessaire de prendre en compte la possibilité d'une déviation du navire par rapport à la ligne de route, et la valeur de déviation augmentera avec l'augmentation de la distance parcourue, en particulier lors de la navigation avec dérive et actuel. La précision insuffisante du calcul nécessite un contrôle supplémentaire sur la position du navire, c'est-à-dire la détermination de sa position non seulement par calcul, mais également par des observations : de navigation, astronomiques ou à l'aide du GPS.
§ 26. Calcul graphique et écrit de la route du navire
Informations générales. La pose, effectuée sans vérifier la position du navire en déterminant sa place sur des objets côtiers ou sur des corps célestes, est appelée l'estime du navire. Le calcul effectué sur la carte par la méthode des constructions graphiques est appelé graphiqueà l'estime de la trajectoire du navire et effectuée à l'aide de calculs utilisant des formules spéciales - écrit(analytique).Calcul graphique. L'essence de cette méthode est la suivante. Au moment de déterminer le point de départ a "(voir Fig. 29), ils notent l'heure mais l'horloge du navire (jusqu'à 1 minute) et les relevés du compteur de décalage (jusqu'à 0,1 mille). Le point de départ a" est encerclé et une inscription est faite près de lui dans un endroit libre sous forme de fraction: numérateur - temps, dénominateur - lectures de décalage 18,00 / 2,5 Si le point observé a "est suffisamment proche du point de départ a, alors à partir du point a" une première ligne de parcours est tracée sous la forme d'une droite parallèle à la ligne ac. Après cela, la ligne ac est effacée de la carte, et sur la ligne nouvellement tracée est inscrit le nombre de degrés du cap de la boussole et ensuite, entre parenthèses, la correction générale du compas AK calculée pour ce cap, de sorte qu'elle puisse toujours être établi quel cours a été jugé.
Si le point observé a" est si éloigné du point a que la trajectoire du navire passe à proximité des dangers (ligne pointillée sur la Fig. 29), alors une nouvelle route est tracée comme indiqué ci-dessus au § 25.
Sur la ligne de chemin, les places numérotées du navire sont marquées toutes les heures. Pour ce faire, la distance parcourue par le navire en 1 heure, à l'échelle de la carte, est tracée au mètre sur la trajectoire du navire depuis le point de départ. À l'endroit marqué par le compteur, une encoche est faite sous la forme d'une courte ligne droite perpendiculaire à la ligne de voie, ainsi qu'une inscription des relevés de temps et de décalage.
Si le navire doit changer de direction, alors au moment du changement de cap, l'heure et le compte à rebours du décalage sont à nouveau remarqués. Après avoir calculé le voyage effectué à partir du dernier point dénombrable, déposez-le le long du chemin, marquez le point de virage avec un enregistrement sous forme de fraction (04,37 / 70,2) et tracez un nouveau cap à partir de ce point. Si, pour une raison quelconque, le navire se retrouve au point c", qui est sensiblement éloigné du point c marqué par la pose préliminaire, alors un nouveau cap est tracé de manière à atteindre le point d du deuxième virage. Après cela, la ligne cd est également effacé de la carte, et sur la ligne c "d" inscrire le nombre de degrés KK et ensuite, entre parenthèses, la correction générale de la boussole AK pour CE parcours.
Le maintien d'un tracé graphique permet au navigateur d'avoir une représentation visuelle de la position du navire par rapport aux aléas de navigation.
La précision du traçage dépend de la précision avec laquelle le parcours est tracé et la distance parcourue est prise en compte. La précision du joint est exprimée par la formule suivante :
où Slo - la valeur de la navigation effectuée par le navire ;
Ek est l'erreur dans la correction totale de la boussole ;
Es - erreur de correction du décalage, %.
Exemple 26. Déterminez le rayon du cercle à l'intérieur duquel devrait se trouver la position du navire qui a dépassé un cap de 60 milles, si l'erreur possible de cap est de ±1°, et l'erreur possible de correction du décalage est de (-2,0 %) .
Solution. Par la formule (31)
Faire tourner le navire d'un cap à un autre introduit une erreur supplémentaire dans la pose, car après avoir changé le gouvernail, le navire ne change pas instantanément la direction du mouvement, mais décrit une certaine courbe (circulation) par le centre de gravité.
La prise en compte de la circulation est d'une grande importance lors de la navigation dans des eaux exiguës, des espaces étroits, des écueils, etc. La circulation est prise en compte comme suit.
Le navire (Fig. 30), suivant dans la direction de K1, au point A doit tourner dans la direction de K2 (l'angle de rotation est a). Pour tenir compte de la circulation, on trace une bissectrice de l'angle interne de rotation (3 = 180°-a et on y cherche le centre O du cercle de rayon égal à la moitié du diamètre tactique de la circulation Dc qui est déterminé empiriquement et généralement exprimé en longueurs de coque du navire.
Après avoir tracé un cercle, marquez les points B et C de sa touche avec les lignes K1 et K2. Le point B est considéré comme le début du tour.
Décompte écrit. La position de calcul du navire peut être obtenue par la méthode analytique du calcul écrit dans les cas où il est irrationnel d'utiliser le calcul graphique de la trajectoire du navire : lors de la navigation dans les hautes latitudes, lors de la navigation dans les glaces, de la chasse à la baleine, etc.

Riz. trente.
L'essence du calcul écrit est de déterminer les coordonnées du point d'arrivée avec les coordonnées connues du point de départ, le cap et la navigation du navire. A l'aide d'un calcul écrit, il est possible de résoudre le problème inverse : déterminer la navigation et le cap du navire à partir des coordonnées connues des points d'arrivée et de départ.
Sur la base des formules (4) et (5), les coordonnées du point d'arrivée peuvent être exprimées comme suit :

Si la navigation a lieu à de basses latitudes, les expressions pour RH et RH peuvent être facilement obtenues à partir de l'examen de ce que l'on appelle triangle de navigation ABC (Fig. 31), dans laquelle :
A - point de départ avec les coordonnées cp1 et L2 ;
B - point d'arrivée avec les coordonnées cp2 et L2 ;
K \u003d LSAB - cap du navire lors du déplacement d'un point A à un point B ;
AB=S - distance entre les points de départ et d'arrivée ;
AC=RSh et VS=OTSH.
Si nous supposons que le triangle ABC est plat et rectangulaire, alors directement à partir de la Fig. 31 on obtient :

De plus, en substituant la valeur de OT W de la formule (6), nous obtenons
En fait, AABC n'est ni plat ni rectangulaire (la figure ACBC "est un trapèze sphérique). Par conséquent, RD1 \u003d \u003d RD2 (cpB \u003d cpA), mais la valeur réelle
Où
![]()
- latitude moyenne.
Pour faciliter le travail du navigateur dans le MT-63, il existe des tables auxiliaires : onglet. 24 donne les valeurs RSH et RSH pour les arguments S (natation) et K (cap) ; languette.
25-a - Valeurs RD en termes de φm et RNR.

Riz. 31.
Si le calcul est effectué sur la transition effectuée par le navire sur le même parcours, alors il est dit simple, et s'il y a plusieurs parcours, il est dit composite. Le calcul composite est utilisé lors de la navigation sur le courant, en particulier sur la marée; dans ce cas, le cours est pris en compte comme un cours supplémentaire distinct (cours). Dans le calcul composite, RSH et RD sont calculés ou sélectionnés à partir de tableaux pour chaque parcours individuel et chaque natation. En composant la somme algébrique de tous les RSH et OSH, nous obtenons le RSH général et l'OSH général. Ensuite, calculez la latitude du point d'arrivée à l'aide de la formule
φ2 = φ1 + PSH général
Et la formule générale
Lors de la navigation, le navire se trouve à la frontière de deux environnements - l'air et l'eau, dont le mouvement l'affecte, s'écartant du cap et modifiant la vitesse de déplacement.
La dérive d'un navire par le vent s'appelle la dérive. Le vent est le mouvement vers l'avant des masses d'air. La direction du vent est la direction (en degrés) d'où souffle le vent. La vitesse du vent est mesurée en mètres par seconde ou en points.
Fig. 1
Soit V0 la vitesse du navire par rapport à l'eau, due au travail de ses propres hélices (Fig. 1). La résistance de l'air au mouvement du navire est perçue par l'observateur à bord du navire comme un contre-courant d'air dont le vecteur vitesse est (-V0). Soit u le vecteur vitesse du vent vrai. Le contre-courant de l'air et le vent réel, additionnés, forment un flux total observé sur un navire en mouvement et appelé vent apparent (observé). Le vecteur vitesse du vent apparent est égal à la somme géométrique :
W \u003d u + (-V0) \u003d u - V0.
La vitesse du vent apparent est déterminée automatiquement à l'aide d'un anémomètre ou manuellement à l'aide d'un anémomètre, la direction KW est déterminée par un anémomètre ou en direction d'un drapeau ou d'un fanion. Vent apparent. Inactif sur le navire à un angle de cap qW, il provoque la force aérodynamique totale P appliquée au centre de dérive du navire. En raison des propriétés de réfraction de la superstructure, la direction de la force P dans le cas général ne coïncide pas avec la direction du vent apparent. Sous l'action de la force P, le navire se déplace dans la direction de cette force avec une vitesse de dérive VDR.
Décomposons la vitesse VDR en composantes VDR X le long du plan diamétral et VDR Y le long de la traverse. La vitesse VDR X, selon la direction du vent apparent, est soustraite ou ajoutée à la vitesse V0. Si le décalage fonctionne, il tient compte de cette vitesse. C'est pourquoi
Vl \u003d V0 + VDR X.
La vitesse VDR Y dévie le navire du cap défini. Après avoir additionné géométriquement la vitesse du navire Vl avec la vitesse VDR Y, nous obtenons le vecteur V de la vitesse réelle, ou au sol, du navire :
V \u003d Vl + VDR Y.
Comme vous pouvez le voir, en additionnant les vitesses Vl et VDR Y, le navire se déplace dans le sens de leur résultante.
La ligne le long de laquelle le navire se déplace réellement par rapport au fond sous l'action des propulseurs et du vent apparent est appelée trajectoire de dérive. Le plan diamétral du navire, lorsqu'il se déplace le long de la ligne de route, reste parallèle à la ligne de la route vraie. Cela est dû au fait que le barreur maintient constamment un cap vrai donné. Par conséquent, le navire avance le long du chemin non pas avec sa proue, mais avec sa pommette.
L'angle dans le plan de l'horizon vrai entre la partie nord du vrai méridien et la ligne de route pendant la dérive est appelé l'angle de route pendant la dérive PU?.
L'angle dans le plan de l'horizon vrai entre les lignes de la route vraie et la route lors de la dérive s'appelle l'angle de dérive ?. Si le vent souffle du côté bâbord du navire, l'angle de dérive est positif (l'angle de cap pendant la dérive est supérieur au cap vrai). Avec un vent tribord, l'angle de dérive est négatif (l'angle de route pendant la dérive est inférieur au cap vrai).
L'angle de dérive dépend de la vitesse et de l'angle de cap du vent apparent, de la vitesse et des caractéristiques de conception du navire : la hauteur et l'architecture des superstructures, la partie superficielle de la coque et la forme des contours de la coque. L'angle de dérive est mesuré avec un dérivemètre. En l'absence de cet instrument, les angles de dérive pour diverses conditions de navigation sont sélectionnés à partir d'une table de dérive compilée à partir de données expérimentales. De la fig. 1 est visible :
Formules - algébrique, angle ? est pris avec son signe.
Dans la pratique de la navigation maritime, il est nécessaire de résoudre principalement deux problèmes liés à la dérive du navire. Tâche directe :
Calculer l'angle au sol lorsque le lanceur dérive ? (route du navire en dérive), si le cap vrai est défini.
Pour résoudre ce problème, il vous faut :
- déterminer le signe de l'angle de dérive ? ;
— calculer l'angle de cap qW du vent apparent ;
— choisir la valeur de l'angle ? de la table de dérive par arguments : par vitesse du navire et qW ;
- calculer l'angle de piste lors de la dérive du lanceur ?, poser la piste sur la carte.
KK = 79,0° ; Vl = 12,0 nœuds ;
?GK = + 1,0°; vent 5° -12 m/s.
Solution:
Le vent souffle du côté bâbord du navire - angle ? positif:
IR = KK + ?GK = 80,0°;
? = +4,0 ° ; PU ? = IR + ? = 84,0°.
2. Pose de vrais relèvements radio au cas où la radiobalise serait située à l'extérieur des limites est ou ouest de la fenêtre cartographique.
Pour trouver la position du point de définition (point M') par lequel sera tracé le relèvement radio sur le KRMK (point A), il faut :
1) ? de "RTSNO" écrivez les coordonnées de KRMKA (? A,? A);
2) ? calculer la valeur ? ? = ?Р – ?А, où ?Р – longitude du cadre latéral de la carte ;
3) ? tracez un parallèle de KRMKA sur la carte (? A - de "RTSNO") et mettez de côté le segment ;
4) ? par t. A "pour dessiner un méridien supplémentaire aa;
5) ? de T. A' maintenez Lok. P KRMKA A à l'intersection avec aa - t M;
6) ? de T. M le long de aa, mettre de côté un segment et à travers le point obtenu M 'pour tracer un relèvement radio sur KRMK A? ce sera la ligne de position souhaitée (I–I).
La détermination de la position du navire en calculant ses coordonnées actuelles (dénombrables) à partir des coordonnées initiales connues le long du parcours, de la vitesse, en tenant compte de la dérive, de la dérive et du temps s'appelle le calcul des coordonnées du navire ( Dead Reckoning ) ou abrégécompte .
Les coordonnées de la place calculée du navire sont appelées coordonnées dénombrables et sont marqués :
φ AVEC - la latitude de calcul ;
λ AVEC - longitude dénombrable.
Lieu dénombrable - la position du navire, déterminée sur la base du calcul des coordonnées de sa position.
Attribution de compte est l'orientation du navire par rapport au terrain avec une précision qui assure la sécurité de navigation de sa navigation.
La ligne le long de laquelle le navire se déplace réellement sous l'influence de la propulsion, du vent et du courant est appelée ligne de piste.
L'essence de la numérotation consiste dans le fait qu'à partir d'un point de départ connu sur la carte de navigation, les directions du mouvement du navire et les distances parcourues le long de celles-ci sont tracées afin d'obtenir sa position à un instant donné.
compte coordonnées du navire classifié:
Par méthode de comptage :
graphique , sur la base de la comptabilisation continue des éléments du numéral et de leur représentation sur la carte de navigation ;
analytique , basée sur le calcul des coordonnées courantes selon certaines dépendances mathématiques.
Par degré d'automatisation :
automatique produit à l'aide d'ordinateurs spéciaux (autotraceur, autonumérateur, etc.);
d'observation , calcul automatique basé sur la mise à jour continue des coordonnées calculables actuelles par des points de repère externes ;
manuel , réalisé à l'aide d'actions grapho-analytiques effectuées manuellement ou à l'aide de tableaux.
Exigences à l'estime
Au compte ce qui suit exigences:
le calcul doit être en continu, afin de connaître à tout moment la position du navire (ses coordonnées actuelles) par rapport au terrain ;
le calcul devrait être précis assurer la sécurité de la navigation et la solution des problèmes inhérents à ce navire ;
le calcul devrait suffire simple et visuel.
La meilleure façon de comptabiliser le mouvement des navires est automatique avec calcul graphique manuel obligatoire, qui, en substance, satisfait à toutes les exigences du calcul.
Même en présence de systèmes de navigation modernes, dans lesquels le processus de calcul est entièrement automatisé et d'une grande précision, le calcul graphique manuel est obligatoire pour contrôler et éliminer les échecs en cas de dysfonctionnement des instruments.
La méthode graphique manuelle de calcul est souvent appelée pavé de navigation, bien que ce dernier → le concept soit plus large (+ déterminer les lieux, etc.).
Navigation pose de la trajectoire du navire – constructions graphiques sur la carte marine lors de la résolution de problèmes de navigation de navigation.
Tâches à résoudre avec l'estime graphique manuelle
En l'absence de vent et de courant, le navire ne se déplace par rapport au fond marin que sous l'influence de sa propre propulsion.
Si l'on néglige le lacet du navire (écarts du barreur par rapport au cap fixé pour celui-ci) et que l'on considère que la correction de l'indicateur de cap est constante, alors la ligne de route du navire sur la carte de navigation s'affichera en ligne droite coïncidant avec la direction de la route vraie.
Chemin du navire - le sens de déplacement du centre de masse du navire, mesuré par l'angle horizontal entre la partie nord du vrai méridien et la ligne de route du navire dans le sens des aiguilles d'une montre de 0° à 360° (système de comptage circulaire).
Piste du navire - la ligne le long de laquelle le centre de masse du navire se déplace par rapport au fond marin(fig.5.3).
Riz. 5.3. Ligne de voie et voie de bateau
Avec le calcul graphique manuel des coordonnées du navire, sans tenir compte de la dérive et du courant, les tâches suivantes sont résolues :
calcul et pose de routes vraies ;
calcul et pose des distances parcourues par le navire ;
comptabilisation de la circulation - changements de cap du navire.
Lors du calcul, les lectures des instruments sont utilisées:
répétiteur indicateur de cap(compas magnétique, compas gyroscopique, etc.) – CQ;
répétiteur décalage(valeurs V L Et LO);
tachymètres(N rpm - le nombre de tours des hélices);
horloge du navire (heure actuelle).
La position du navire au mouillage (tonneau, à quai), déterminée par des observations d'amers côtiers ou à l'estime (Fig. 5.4), est prise comme point de départ pour le début de l'estime.

Riz. 5.4. Enregistrement du calcul graphique de la route du navire sur la feuille de route
1. Par coordonnées dénombrables ( φ AVEC , λ AVEC) nous plaçons le lieu d'ancrage, près duquel, dans le lieu libre, nous enregistrons le temps de prise de vue depuis l'ancre et la lecture complète du compteur de décalage ( LO 0 ):
Dans tous les cas, la barre fractionnaire de l'entrée est effectuée le long d'une règle et parallèle à une parallèle.
2. A partir du point d'ancrage, on trace la direction de la vraie ligne de route, calculée par la formule :
Si le cap provient d'un gyrocompas, alors
Si le cap provient d'un compas magnétique, alors
|
RI = QC MK + Δ MK |
|
Δ MK = d + δ |
– correction du compas magnétique.
Au-dessus du point d'ancrage ligne de route vraie (ligne de voie) l'inscription est faite :
CQ est l'abréviation du cap compas ( GKK, KK GL , KK P);
127,0° - la valeur du cap au compas donné au barreur (signe égal entre CQ et 127,0 ° n'est pas réglé selon les règles);
(+2,0°) – la valeur et le signe de la correction de l'indicateur de cap adopté sont indiqués entre parenthèses.
L'inscription au-dessus de la ligne de parcours permet de contrôler :
L'exactitude du maintien du cap défini (127,0°) par le barreur ;
La valeur de la correction acceptée et prise en compte de l'indicateur de cap (+2,0 °);
L'exactitude de la direction de la ligne du parcours vrai sur la carte (129,0 °).
Lorsque le navire suit une route donnée, le barreur vérifie régulièrement (toutes les 15 minutes) les lectures des routes par rapport à l'indicateur de route principale (selon CG ou par Géorgie ou autres) et à l'aide d'un compas magnétique avec rapport au capitaine de quart (l'officier de quart).
Les coordonnées comptables du navire sont enregistrées dans le journal de bord :
lors du tir d'un navire depuis l'ancre (canon) et lors de l'ancrage (canon);
en navigation à l'estime, aux heures multiples de la 4ème (00, 04, 08 ... 20) ;
toutes les heures où le navire navigue à l'estime près du rivage ;
lors du changement de quart de navigation (navigation) et dans d'autres cas, selon les instructions du capitaine.
La position numérable du navire est appliquée sur la carte de navigation :
en heures divisibles par quatre (00, 04 ... 20);
lorsque le navire change de cap ou de vitesse ;
lors du changement de la montre de navigation (en marche);
toutes les heures lorsque le navire navigue près du rivage ou dans des eaux restreintes, et dans les autres cas, selon les directives du capitaine.
Pour trouver un lieu calculable pour un temps (actuel) donné, suivez (Fig. 5.4):
Enregistrer les lectures de l'horloge du navire à ± 1 minute près (11.00) ;
Correction du nombre de décalages ( LO 1 ) précis à 0,1 mile (60,4) ;
(Pour V L= 18 nœuds → POUR L = 1,02)S L= 1,02 11,8 = 12,0 milles.
S À PROPOS =12,0 milles
à condition que S L =S À PROPOS → mettre de côté sa valeur (à l'échelle de la carte) à partir du point de départ le long de la route vraie et tracer la position calculée du navire (à 11h00) avec un symbole ( ligne de course IR ~ 5 mm).
À côté de l'endroit à compter, écrivez sous forme de fraction ![]()
Lors de la conduite du calcul, il devient souvent nécessaire connaître l'heure et le compte à rebours du décalage d'arrivée du navire à un point donné(point de rencontre, point d'ancrage, etc.).
Un tel point peut être réglé (fig.5.5):

Riz. 5.5. Façons de définir un point sur la carte
coordonnées ( φ, λ );
direction vers le point de repère ( IP ou KU);
distance ( D) au point de repère, etc.
La procédure pour résoudre le problème .
 CALCUL GRAPHIQUE DE LA VOIE DU NAVIRE. Afin de juger de la sécurité de la navigation, de naviguer dans l'environnement et de choisir les bons caps pour la poursuite du mouvement, le navigateur doit à tout moment connaître la position de son navire. Pour ce faire, il entretient un pavé de navigation. Avant que le navire ne parte en voyage, sous la direction du capitaine, ils étudient les conditions de navigation pour l'ensemble du passage à venir à l'aide de cartes et d'aides à la navigation. Sur la base de ces données, une pose préliminaire est effectuée. Cependant, il ne donne qu'une idée générale des conditions de transition. A partir du moment où vous embarquez pour un voyage, le choix final des parcours et tous les facteurs pris en compte sont déterminés par la situation de navigation spécifique. Par conséquent, le vol est effectué par l'exécutif portant. Il comprend l'estime, les calculs et la cartographie, les calculs de manœuvre pour éviter d'autres navires.
CALCUL GRAPHIQUE DE LA VOIE DU NAVIRE. Afin de juger de la sécurité de la navigation, de naviguer dans l'environnement et de choisir les bons caps pour la poursuite du mouvement, le navigateur doit à tout moment connaître la position de son navire. Pour ce faire, il entretient un pavé de navigation. Avant que le navire ne parte en voyage, sous la direction du capitaine, ils étudient les conditions de navigation pour l'ensemble du passage à venir à l'aide de cartes et d'aides à la navigation. Sur la base de ces données, une pose préliminaire est effectuée. Cependant, il ne donne qu'une idée générale des conditions de transition. A partir du moment où vous embarquez pour un voyage, le choix final des parcours et tous les facteurs pris en compte sont déterminés par la situation de navigation spécifique. Par conséquent, le vol est effectué par l'exécutif portant. Il comprend l'estime, les calculs et la cartographie, les calculs de manœuvre pour éviter d'autres navires.
 L'estime est la comptabilisation continue des éléments du mouvement du navire (vitesse et direction) et des effets des forces extérieures afin de déterminer les coordonnées du navire (lieu dénombrable) sans observer les repères côtiers et les corps célestes (observations). Cette comptabilisation est effectuée sur la base des valeurs du vecteur cap, vitesse et dérive du navire. Le point de départ de l'estime sur la carte est déterminé par le capitaine. Pour un tel point, on peut prendre la position exacte du navire, obtenue immédiatement après avoir quitté la zone d'eau du port, un phare flottant, une bouée de réception, etc.. Ses coordonnées sont enregistrées dans le journal de bord. Au moment où la pose exécutive commence, vous devez allumer le journal, déterminer la correction de la boussole par alignement ou d'une autre manière.
L'estime est la comptabilisation continue des éléments du mouvement du navire (vitesse et direction) et des effets des forces extérieures afin de déterminer les coordonnées du navire (lieu dénombrable) sans observer les repères côtiers et les corps célestes (observations). Cette comptabilisation est effectuée sur la base des valeurs du vecteur cap, vitesse et dérive du navire. Le point de départ de l'estime sur la carte est déterminé par le capitaine. Pour un tel point, on peut prendre la position exacte du navire, obtenue immédiatement après avoir quitté la zone d'eau du port, un phare flottant, une bouée de réception, etc.. Ses coordonnées sont enregistrées dans le journal de bord. Au moment où la pose exécutive commence, vous devez allumer le journal, déterminer la correction de la boussole par alignement ou d'une autre manière.
 GARDER LE NUMÉRO LORS DE LA NAGE SANS DÉRIVE ET SANS COURANT. Lorsque vous naviguez sans dérive ni courant, la trajectoire du navire sur la carte coïncide avec la ligne IC, par conséquent, le mouvement du navire sur la carte est pris en compte le long des lignes IC, le long desquelles les distances parcourues par le navire le long du journal sont tracées, compte tenu de son coefficient Kl. A partir du point de départ sur la carte, une ligne du premier parcours est tracée. Le CI extrait de la carte est transféré au CC, sur lequel ils sont placés selon le compas magnétique. Sur la carte au-dessus de la ligne IR, le cap de la boussole et sa correction sont inscrits. La distance Sl parcourue le long du parcours est déterminée par le décalage : Sl = Cl (ol 2 - ol 1) ; (Où ol 2 est la lecture de retard à l'emplacement du navire, ol 1 est la lecture de retard au point de départ, Kl est le coefficient de retard).
GARDER LE NUMÉRO LORS DE LA NAGE SANS DÉRIVE ET SANS COURANT. Lorsque vous naviguez sans dérive ni courant, la trajectoire du navire sur la carte coïncide avec la ligne IC, par conséquent, le mouvement du navire sur la carte est pris en compte le long des lignes IC, le long desquelles les distances parcourues par le navire le long du journal sont tracées, compte tenu de son coefficient Kl. A partir du point de départ sur la carte, une ligne du premier parcours est tracée. Le CI extrait de la carte est transféré au CC, sur lequel ils sont placés selon le compas magnétique. Sur la carte au-dessus de la ligne IR, le cap de la boussole et sa correction sont inscrits. La distance Sl parcourue le long du parcours est déterminée par le décalage : Sl = Cl (ol 2 - ol 1) ; (Où ol 2 est la lecture de retard à l'emplacement du navire, ol 1 est la lecture de retard au point de départ, Kl est le coefficient de retard).
 A l'instar de la CI, dans les cas indiqués ci-dessous, le calcul de la revanche du navire est appliqué, c'est-à-dire la place calculée en fonction de la route et de la navigation. Si la navigation est effectuée près de la côte, des points dénombrables sont marqués toutes les heures, en pleine mer - à la fin de la montre. De plus, une place comptable est appliquée aux points de début et de fin des virages, lors du changement de vitesse, lors de la réception des observations. Près de la position du navire, sous forme de fraction, le moment est enregistré selon l'horloge du navire avec une précision de 1 min (T) et la lecture du décalage avec une précision de 0,1 mille (ol). (Voir Figure 31).
A l'instar de la CI, dans les cas indiqués ci-dessous, le calcul de la revanche du navire est appliqué, c'est-à-dire la place calculée en fonction de la route et de la navigation. Si la navigation est effectuée près de la côte, des points dénombrables sont marqués toutes les heures, en pleine mer - à la fin de la montre. De plus, une place comptable est appliquée aux points de début et de fin des virages, lors du changement de vitesse, lors de la réception des observations. Près de la position du navire, sous forme de fraction, le moment est enregistré selon l'horloge du navire avec une précision de 1 min (T) et la lecture du décalage avec une précision de 0,1 mille (ol). (Voir Figure 31).

 Dans des conditions réelles de navigation maritime, trois options principales sont possibles, qui déterminent les méthodes pratiques appropriées d'estime de la route du yacht : naviguer dans des conditions de plein vent stable ; naviguer dans des conditions de vent contraire stable ; naviguer dans des vents instables en force et en direction.
Dans des conditions réelles de navigation maritime, trois options principales sont possibles, qui déterminent les méthodes pratiques appropriées d'estime de la route du yacht : naviguer dans des conditions de plein vent stable ; naviguer dans des conditions de vent contraire stable ; naviguer dans des vents instables en force et en direction.
 Dans le premier cas, le yacht est généralement conduit le long de la ligne du chemin tracé lors de la pose préliminaire. Les termes de calcul sont ici favorables. Dans le second cas, le pointage s'effectue par rapport au cap général, alors que la trajectoire réelle posée sur chaque point ne coïncide pas avec la pose préliminaire. Si le bord n'est pas trop raide, alors le barreur maintient avec précision un cap donné, ce qui simplifie le calcul et augmente sa précision. Dans ces conditions, la durée des virements dépend de l'angle du virement (l'angle entre la route générale et la trajectoire du voilier). Si les angles des virements droit et gauche sont égaux, leur durée est la même et le virement peut être symétrique. Sinon, l'estime et la pose de la voie sont effectuées sur chaque bord privé en fonction des données de l'instrument. S'il n'y a pas de décalage, il est recommandé d'évaluer la vitesse sur chaque bord.
Dans le premier cas, le yacht est généralement conduit le long de la ligne du chemin tracé lors de la pose préliminaire. Les termes de calcul sont ici favorables. Dans le second cas, le pointage s'effectue par rapport au cap général, alors que la trajectoire réelle posée sur chaque point ne coïncide pas avec la pose préliminaire. Si le bord n'est pas trop raide, alors le barreur maintient avec précision un cap donné, ce qui simplifie le calcul et augmente sa précision. Dans ces conditions, la durée des virements dépend de l'angle du virement (l'angle entre la route générale et la trajectoire du voilier). Si les angles des virements droit et gauche sont égaux, leur durée est la même et le virement peut être symétrique. Sinon, l'estime et la pose de la voie sont effectuées sur chaque bord privé en fonction des données de l'instrument. S'il n'y a pas de décalage, il est recommandé d'évaluer la vitesse sur chaque bord.
 Lors d'un virement de bord, il peut arriver que le barreur, sous la direction du capitaine du yacht, lorsqu'il sort face au vent, ne fasse pas attention à la boussole. Ici, à des intervalles de temps petits mais égaux (15 à 30 minutes), le QC moyen et l'IC correspondant sont déterminés et enregistrés, selon lesquels les données obtenues par le décalage ou la vitesse sont mises de côté. Par vent instable, le barreur ne fixe pas le cap, mais se fixe pour tâche de guider la voile à la recherche du vent, en respectant au plus près le cap général. Parfois dans une telle situation, en fonction des indications locales et des prévisions météo, il peut être avantageux de s'écarter du cap général pour obtenir plus tôt un plein vent régulier (par exemple, une brise au large). Dans tous ces cas, dans un souci d'estime, tous les virages sont enregistrés sur le voilier et sur chaque bord (au début et à la fin du bord, c'est obligatoire) avec une certaine fréquence (1 à 2 fois par heure, selon sur conditions), des données sur le mouvement du navire (temps, cap, vitesse, lecture de décalage). Ces enregistrements sont traités en faisant la moyenne du cap et de la vitesse de chaque bord, puis tracés sur la carte.
Lors d'un virement de bord, il peut arriver que le barreur, sous la direction du capitaine du yacht, lorsqu'il sort face au vent, ne fasse pas attention à la boussole. Ici, à des intervalles de temps petits mais égaux (15 à 30 minutes), le QC moyen et l'IC correspondant sont déterminés et enregistrés, selon lesquels les données obtenues par le décalage ou la vitesse sont mises de côté. Par vent instable, le barreur ne fixe pas le cap, mais se fixe pour tâche de guider la voile à la recherche du vent, en respectant au plus près le cap général. Parfois dans une telle situation, en fonction des indications locales et des prévisions météo, il peut être avantageux de s'écarter du cap général pour obtenir plus tôt un plein vent régulier (par exemple, une brise au large). Dans tous ces cas, dans un souci d'estime, tous les virages sont enregistrés sur le voilier et sur chaque bord (au début et à la fin du bord, c'est obligatoire) avec une certaine fréquence (1 à 2 fois par heure, selon sur conditions), des données sur le mouvement du navire (temps, cap, vitesse, lecture de décalage). Ces enregistrements sont traités en faisant la moyenne du cap et de la vitesse de chaque bord, puis tracés sur la carte.
 La pratique montre que la précision du calcul dans de telles conditions augmente avec la discrétion croissante des observations. Les erreurs d'approximation des sections courbes de navigation par des lignes droites seront insignifiantes par rapport aux autres erreurs.
La pratique montre que la précision du calcul dans de telles conditions augmente avec la discrétion croissante des observations. Les erreurs d'approximation des sections courbes de navigation par des lignes droites seront insignifiantes par rapport aux autres erreurs.
 LA DÉRIVE DU NAVIRE. En navigation, la dérive ("a") désigne la dérive d'un navire par rapport à la ligne de route sous l'action combinée du vent et des vagues provoquées par celui-ci. Lors de la dérive, le navire se déplace par rapport à l'eau sous l'action conjuguée des machines du navire et du vent. La ligne de son mouvement réel (OV), appelée ligne de route du navire pendant la dérive, ne coïncide pas avec la route du navire (OA). (Voir Figure 33). Lorsque la ligne de route est décalée à droite du DP du navire (le vent souffle à bâbord), un signe plus (+) est attribué à a, et lorsque la route est décalée à gauche (le vent souffle à tribord côté), un signe moins (-) est attribué. Relation entre l'angle de route avec dérive (PUa), IC et a : PUa = IC + a ; IR \u003d PUa - un; a = PUa - IR
LA DÉRIVE DU NAVIRE. En navigation, la dérive ("a") désigne la dérive d'un navire par rapport à la ligne de route sous l'action combinée du vent et des vagues provoquées par celui-ci. Lors de la dérive, le navire se déplace par rapport à l'eau sous l'action conjuguée des machines du navire et du vent. La ligne de son mouvement réel (OV), appelée ligne de route du navire pendant la dérive, ne coïncide pas avec la route du navire (OA). (Voir Figure 33). Lorsque la ligne de route est décalée à droite du DP du navire (le vent souffle à bâbord), un signe plus (+) est attribué à a, et lorsque la route est décalée à gauche (le vent souffle à tribord côté), un signe moins (-) est attribué. Relation entre l'angle de route avec dérive (PUa), IC et a : PUa = IC + a ; IR \u003d PUa - un; a = PUa - IR

 L'angle de dérive peut être déterminé en comparant la trajectoire réelle du navire obtenue à partir des observations avec l'IR. En suivant en vue de la côte, un certain nombre d'observations de navigation fiables sont faites. En reliant les points observés, on obtient la ligne du mouvement réel du navire, c'est-à-dire la ligne de route lors de la dérive du lanceur (Fig. 34). L'angle entre la ligne de trace et la ligne IR tracée sur la carte correspond à l'angle de dérive. L'angle de dérive trouvé avec son signe est pris en compte dans le calcul ultérieur. S'il y a un courant dans la zone de navigation, l'angle de dérive résultant sera le résultat de l'impact sur le navire non seulement du vent, mais également du courant.
L'angle de dérive peut être déterminé en comparant la trajectoire réelle du navire obtenue à partir des observations avec l'IR. En suivant en vue de la côte, un certain nombre d'observations de navigation fiables sont faites. En reliant les points observés, on obtient la ligne du mouvement réel du navire, c'est-à-dire la ligne de route lors de la dérive du lanceur (Fig. 34). L'angle entre la ligne de trace et la ligne IR tracée sur la carte correspond à l'angle de dérive. L'angle de dérive trouvé avec son signe est pris en compte dans le calcul ultérieur. S'il y a un courant dans la zone de navigation, l'angle de dérive résultant sera le résultat de l'impact sur le navire non seulement du vent, mais également du courant.
 COMPTE DE LA DÉRIVE DANS LE CALCUL. Si le navire dérive, lors du traçage, la ligne de la trajectoire du navire pendant la dérive est tracée sur la carte. Il est inscrit KK, la correction compas et l'angle de dérive a pris en compte avec son signe. Le long de la ligne de trajectoire, les distances Sl parcourues le long du décalage sont mises à disposition. On croit que pour un
COMPTE DE LA DÉRIVE DANS LE CALCUL. Si le navire dérive, lors du traçage, la ligne de la trajectoire du navire pendant la dérive est tracée sur la carte. Il est inscrit KK, la correction compas et l'angle de dérive a pris en compte avec son signe. Le long de la ligne de trajectoire, les distances Sl parcourues le long du décalage sont mises à disposition. On croit que pour un
 Si le navigateur n'est pas sûr de la précision de l'angle de dérive, alors afin de contrôler la sécurité de la navigation, en plus de la trajectoire de dérive, il est recommandé de tracer la ligne IR sur la carte. Ces deux lignes doivent être exemptes d'obstacles sous-marins. Le calcul est effectué uniquement le long de la ligne de voie, le long de laquelle le navire se déplace.
Si le navigateur n'est pas sûr de la précision de l'angle de dérive, alors afin de contrôler la sécurité de la navigation, en plus de la trajectoire de dérive, il est recommandé de tracer la ligne IR sur la carte. Ces deux lignes doivent être exemptes d'obstacles sous-marins. Le calcul est effectué uniquement le long de la ligne de voie, le long de laquelle le navire se déplace.
 COURANTS MARINS. Les courants marins sont les mouvements horizontaux de grandes masses d'eau. Le flux est caractérisé par ses éléments : direction et vitesse. La direction du courant Kt est indiquée en degrés dans un compte circulaire ou rhumbs et est fixée en fonction du point de l'horizon vers lequel le courant est dirigé. La vitesse du courant Vt est mesurée en nœuds et ses petites vitesses sont mesurées en miles par jour. Selon la nature du flux, ils sont classés en constantes, dont les éléments ne changent presque pas d'une année sur l'autre, périodiques, dont les éléments changent selon une certaine loi, et temporaires (aléatoire), dont les éléments peut changer radicalement. En pratique, le navigateur est le plus souvent confronté à des courants constants et périodiques (de marée). Les informations sur les éléments des courants constants et de marée sont placées dans les directions nautiques, les atlas des courants et sur les cartes. Dans le même temps, les valeurs moyennes des éléments de flux sont indiquées, ce qui peut différer considérablement des valeurs réelles. Le mouvement du navire par rapport au sol lorsqu'il nage dans le courant est déterminé par les facteurs suivants (Fig. 36).
COURANTS MARINS. Les courants marins sont les mouvements horizontaux de grandes masses d'eau. Le flux est caractérisé par ses éléments : direction et vitesse. La direction du courant Kt est indiquée en degrés dans un compte circulaire ou rhumbs et est fixée en fonction du point de l'horizon vers lequel le courant est dirigé. La vitesse du courant Vt est mesurée en nœuds et ses petites vitesses sont mesurées en miles par jour. Selon la nature du flux, ils sont classés en constantes, dont les éléments ne changent presque pas d'une année sur l'autre, périodiques, dont les éléments changent selon une certaine loi, et temporaires (aléatoire), dont les éléments peut changer radicalement. En pratique, le navigateur est le plus souvent confronté à des courants constants et périodiques (de marée). Les informations sur les éléments des courants constants et de marée sont placées dans les directions nautiques, les atlas des courants et sur les cartes. Dans le même temps, les valeurs moyennes des éléments de flux sont indiquées, ce qui peut différer considérablement des valeurs réelles. Le mouvement du navire par rapport au sol lorsqu'il nage dans le courant est déterminé par les facteurs suivants (Fig. 36).

 Sous l'action des moteurs du navire, le navire se déplace par rapport à l'eau dans le sens de son DP, c'est-à-dire la ligne de route vraie OA. La vitesse du navire par rapport à l'eau est la vitesse Vl indiquée par le loch. En même temps, avec toute la masse d'eau, le navire est emporté par rapport au sol dans le sens de l'écoulement de l'OD avec la vitesse de l'écoulement Vt. De ce fait, par rapport au sol, le navire se déplace le long de la résultante OB à une vitesse appelée vitesse vraie du navire V. Dans ce cas, la DP du navire reste parallèle à la ligne IR. La ligne OB, le long de laquelle le navire se déplace sous l'action conjuguée des machines du navire et du courant, est appelée ligne de route du navire sur le courant. La position de la ligne de piste par rapport au vrai méridien est déterminée par l'angle NOB, appelé angle de piste sur le courant PU. L'angle " " entre le cap vrai du navire OA et la route OB est appelé angle de dérive. Lorsque le navire dérive vers la droite de son DP (le courant est dirigé vers bâbord), un signe "+" est attribué, et lorsqu'il dérive vers la gauche, un signe "-" est attribué. Relation entre (PU), IR et :
Sous l'action des moteurs du navire, le navire se déplace par rapport à l'eau dans le sens de son DP, c'est-à-dire la ligne de route vraie OA. La vitesse du navire par rapport à l'eau est la vitesse Vl indiquée par le loch. En même temps, avec toute la masse d'eau, le navire est emporté par rapport au sol dans le sens de l'écoulement de l'OD avec la vitesse de l'écoulement Vt. De ce fait, par rapport au sol, le navire se déplace le long de la résultante OB à une vitesse appelée vitesse vraie du navire V. Dans ce cas, la DP du navire reste parallèle à la ligne IR. La ligne OB, le long de laquelle le navire se déplace sous l'action conjuguée des machines du navire et du courant, est appelée ligne de route du navire sur le courant. La position de la ligne de piste par rapport au vrai méridien est déterminée par l'angle NOB, appelé angle de piste sur le courant PU. L'angle " " entre le cap vrai du navire OA et la route OB est appelé angle de dérive. Lorsque le navire dérive vers la droite de son DP (le courant est dirigé vers bâbord), un signe "+" est attribué, et lorsqu'il dérive vers la gauche, un signe "-" est attribué. Relation entre (PU), IR et :
 PU \u003d IR +; IR \u003d PU -; = PU - IR
PU \u003d IR +; IR \u003d PU -; = PU - IR
 NOMBRE QUAND FLOTTANT SUR LE COURANT. Lorsque vous naviguez dans un courant constant, la ligne de trajectoire du navire est tracée sur la carte, le long de laquelle il se déplace réellement par rapport au sol. Au-dessus de la ligne de voie, ils inscrivent KK, la correction de la boussole et l'angle de dérive avec leur propre signe. Pour les calculs auxiliaires, une ligne IR est également appliquée avec une ligne fine, le long de laquelle sont tracées les distances Sl, passées par le navire par rapport à l'eau en fonction des relevés de décalage. Les points obtenus sur la ligne IC sont transférés dans le sens du courant vers la ligne de voie (Fig. 37). Les points dénombrables sur la ligne de piste sont marqués avec des lectures de temps et de décalage, et aux points correspondants sur la ligne de parcours - uniquement des lectures de décalage. Des points de traversée, d'ouverture et de masquage d'amers sont appliqués à la ligne de chemin (Fig. 38).
NOMBRE QUAND FLOTTANT SUR LE COURANT. Lorsque vous naviguez dans un courant constant, la ligne de trajectoire du navire est tracée sur la carte, le long de laquelle il se déplace réellement par rapport au sol. Au-dessus de la ligne de voie, ils inscrivent KK, la correction de la boussole et l'angle de dérive avec leur propre signe. Pour les calculs auxiliaires, une ligne IR est également appliquée avec une ligne fine, le long de laquelle sont tracées les distances Sl, passées par le navire par rapport à l'eau en fonction des relevés de décalage. Les points obtenus sur la ligne IC sont transférés dans le sens du courant vers la ligne de voie (Fig. 37). Les points dénombrables sur la ligne de piste sont marqués avec des lectures de temps et de décalage, et aux points correspondants sur la ligne de parcours - uniquement des lectures de décalage. Des points de traversée, d'ouverture et de masquage d'amers sont appliqués à la ligne de chemin (Fig. 38).

 CALCUL AVEC COMPTABILISATION COMMUNE DE LA DÉRIVE ET DU COURANT. Considérons le cas où le navire se déplace par rapport au sol sous l'action combinée des moteurs du navire, du vent et du courant. Pour maintenir le calcul sur la carte, tracez la ligne de trajectoire du navire pendant la dérive et le courant et inscrivez KK, la correction de la boussole et l'angle de dérive total c \u003d a +.
CALCUL AVEC COMPTABILISATION COMMUNE DE LA DÉRIVE ET DU COURANT. Considérons le cas où le navire se déplace par rapport au sol sous l'action combinée des moteurs du navire, du vent et du courant. Pour maintenir le calcul sur la carte, tracez la ligne de trajectoire du navire pendant la dérive et le courant et inscrivez KK, la correction de la boussole et l'angle de dérive total c \u003d a +.
 De plus, pour les calculs auxiliaires, une trace de dérive est également tracée sur la carte, le long de laquelle la navigation du navire le long du journal Sl est reportée. Chaque point sur la trajectoire de dérive correspond à un point sur la ligne du mouvement réel du navire. Ces points sont reliés entre eux par le vecteur flux. Graphiquement, les tâches liées à la recherche de la ligne de trajectoire sur la carte pendant la dérive et le courant, la vitesse réelle V et l'angle de dérive total c pour les éléments KK, Vl, a et de flux donnés, le traçage d'un lieu dénombrable, le précalcul du temps et ol à l'heure d'arrivée à un point donné, la recherche d'un cheminement du point de référence se résout de la même manière que lors de la nage dans le courant, mais toutes les constructions auxiliaires sont réalisées sur la ligne de piste lors de la dérive, en remplacement de la ligne IR.
De plus, pour les calculs auxiliaires, une trace de dérive est également tracée sur la carte, le long de laquelle la navigation du navire le long du journal Sl est reportée. Chaque point sur la trajectoire de dérive correspond à un point sur la ligne du mouvement réel du navire. Ces points sont reliés entre eux par le vecteur flux. Graphiquement, les tâches liées à la recherche de la ligne de trajectoire sur la carte pendant la dérive et le courant, la vitesse réelle V et l'angle de dérive total c pour les éléments KK, Vl, a et de flux donnés, le traçage d'un lieu dénombrable, le précalcul du temps et ol à l'heure d'arrivée à un point donné, la recherche d'un cheminement du point de référence se résout de la même manière que lors de la nage dans le courant, mais toutes les constructions auxiliaires sont réalisées sur la ligne de piste lors de la dérive, en remplacement de la ligne IR.
 ESTIMATIONS DE L'EXACTITUDE DU NOMBRE. Sous l'effet d'erreurs non comptabilisées, la trajectoire réelle du navire et la distance parcourue par celui-ci (voyage) ne correspondront pas à celles prises en compte lors du calcul sur la carte, et la position réelle du navire ne correspondra pas à celui calculé. Pour un jugement approximatif sur les erreurs de calcul, vous pouvez utiliser les données suivantes, qui reflètent l'expérience généralisée accumulée de la navigation et les études réalisées. La durée de navigation (heures) correspond à l'erreur quadratique moyenne radiale, % de S : jusqu'à 3 heures - 10 % ; 3-6 heures - 9 % ; 6-10 heures - 8 % ; 10 -14h - 7%; 14-18 heures - 6 % ; 18-23h - 5%; 23-25 h - 4%; plus de 35 heures - 3%. Lors de la pose de la route du navire sur la carte à une certaine distance des dangers de navigation, il est nécessaire de prendre en compte la possibilité d'une déviation du navire par rapport à la ligne de route, et la valeur de déviation augmentera avec l'augmentation de la distance parcourue, en particulier lors de la navigation avec dérive et actuel. La précision insuffisante du calcul nécessite un contrôle supplémentaire sur la position du navire, c'est-à-dire la détermination de sa position non seulement par calcul, mais également par des observations : de navigation, astronomiques ou à l'aide du GPS.
ESTIMATIONS DE L'EXACTITUDE DU NOMBRE. Sous l'effet d'erreurs non comptabilisées, la trajectoire réelle du navire et la distance parcourue par celui-ci (voyage) ne correspondront pas à celles prises en compte lors du calcul sur la carte, et la position réelle du navire ne correspondra pas à celui calculé. Pour un jugement approximatif sur les erreurs de calcul, vous pouvez utiliser les données suivantes, qui reflètent l'expérience généralisée accumulée de la navigation et les études réalisées. La durée de navigation (heures) correspond à l'erreur quadratique moyenne radiale, % de S : jusqu'à 3 heures - 10 % ; 3-6 heures - 9 % ; 6-10 heures - 8 % ; 10 -14h - 7%; 14-18 heures - 6 % ; 18-23h - 5%; 23-25 h - 4%; plus de 35 heures - 3%. Lors de la pose de la route du navire sur la carte à une certaine distance des dangers de navigation, il est nécessaire de prendre en compte la possibilité d'une déviation du navire par rapport à la ligne de route, et la valeur de déviation augmentera avec l'augmentation de la distance parcourue, en particulier lors de la navigation avec dérive et actuel. La précision insuffisante du calcul nécessite un contrôle supplémentaire sur la position du navire, c'est-à-dire la détermination de sa position non seulement par calcul, mais également par des observations : de navigation, astronomiques ou à l'aide du GPS.