Grafische Berechnung der Schiffsbahn unter Berücksichtigung der Winddrift. Grafische Berechnung und ihre Genauigkeit Lösung des inversen Problems
Grafische Berechnung des Schiffsweges. Um die Sicherheit der Navigation beurteilen, in der Umgebung navigieren und die richtigen Kurse für die weitere Bewegung wählen zu können, muss der Navigator jederzeit die Position seines Schiffes kennen. Dafür führt er Navigationspad.Bevor das Schiff auf See geht, studieren sie unter Anleitung des Kapitäns anhand von Karten und Navigationshilfen die Navigationsbedingungen für die gesamte bevorstehende Passage. Führen Sie basierend auf diesen Daten eine Durchführung durch vorläufige Verlegung. Allerdings gibt es nur einen allgemeinen Überblick über die Übergangsbedingungen. Von dem Moment an, in dem Sie eine Reise antreten, werden die endgültige Wahl der Kurse und alle berücksichtigten Faktoren von der jeweiligen Segelsituation bestimmt. Daher wird der Flug durchgeführt Führungsdichtung. Es umfasst Koppelnavigation, Berechnungen und Kartenerstellung sowie Manövrierberechnungen, um anderen Schiffen auszuweichen.
Abrechnung bezeichnet die kontinuierliche Berücksichtigung der Elemente der Schiffsbewegung (Geschwindigkeit und Richtung) und der Auswirkungen äußerer Kräfte, um die Koordinaten des Schiffes (berechneter Ort) zu bestimmen, ohne Küstenmarkierungen und Himmelskörper zu beobachten (Beobachtungen). Diese Abrechnung erfolgt auf Basis der Werte Kurs, Geschwindigkeit und Driftvektor des Schiffes. Der Startpunkt für die Koppelnavigation auf der Karte wird vom Kapitän bestimmt. Ein solcher Punkt kann als genaue Position des Schiffes, die unmittelbar nach dem Verlassen des Hafenwasserbereichs ermittelt wird, eines schwimmenden Leuchtturms, einer Empfangsboje usw. angesehen werden. Seine Koordinaten werden im Schiffslogbuch aufgezeichnet. Zu Beginn der Ausführungsverlegung sollten Sie das Protokoll einschalten und die Kompasskorrektur durch Ausrichtung oder auf andere Weise ermitteln.
NUMMERBEHALTUNG BEIM SCHWIMMEN OHNE DRIFT UND STROM. Beim Segeln ohne Drift und Strömung stimmt der Schiffsweg auf der Karte mit der IC-Linie überein, daher wird die Schiffsbewegung auf der Karte entlang der IC-Linien berücksichtigt, entlang derer die vom Schiff zurückgelegten Strecken entlang des Logbuchs aufgetragen werden, unter Berücksichtigung seines Koeffizienten cl. Vom Startpunkt auf der Karte wird eine Linie des ersten Kurses gelegt. Die von der Karte entnommenen ICs werden auf den CC übertragen, auf dem sie entsprechend dem Magnetkompass platziert werden. Auf der Karte oberhalb der IR-Linie sind der Kompasskurs und seine Korrektur eingezeichnet. Zurückgelegte Strecke Sl ermittelt durch Protokoll:
Sl \u003d Cl (ol2 - ol1); (Wo ol2 ol1 cl- Verzögerungsfaktor).
In Anlehnung an das IC wird in den unten angegebenen Fällen die Berechnung der Rache des Schiffes angewendet, d. h. der Ort, der nach Kurs und Navigation berechnet wird. Wird in Küstennähe gefahren, werden auf offener See stündlich zählbare Punkte markiert – am Ende der Wache. Darüber hinaus wird an den Punkten des Beginns und Endes von Kurven, bei Geschwindigkeitsänderungen und beim Empfang von Beobachtungen ein kalkulierbarer Ort angelegt. In der Nähe der Schiffsposition wird der Moment in Form eines Bruchteils gemäß der Schiffsuhr mit einer Genauigkeit von 1 Minute (T) und der Verzögerungswert mit einer Genauigkeit von 0,1 Meilen (ol) aufgezeichnet. (Siehe Abbildung 31).
Unter tatsächlichen Segelbedingungen gibt es drei Hauptoptionen, die die geeigneten Koppelnavigationsverfahren für eine Yacht bestimmen:
- Segeln bei konstantem Vollwind;
- Segeln bei stabilem Gegenwind;
- Segeln bei Winden, die in Stärke und Richtung instabil sind.
Im ersten Fall wird die Yacht in der Regel entlang der bei der Vorverlegung angelegten Trasse gefahren. Die Berechnungsbedingungen sind hier günstig. Im zweiten Fall erfolgt die Wende relativ zum allgemeinen Verlauf, während der tatsächliche Weg, der auf jeder Wende gelegt wird, nicht mit der vorläufigen Verlegung übereinstimmt. Wenn die Wende nicht zu steil ist, behält der Steuermann einen vorgegebenen Kurs genau bei, was die Berechnung vereinfacht und ihre Genauigkeit erhöht. Unter solchen Bedingungen hängt die Dauer der Wende vom Wendewinkel ab (dem Winkel zwischen dem allgemeinen Kurs und dem Kurs der Yacht). Wenn die Winkel der rechten und linken Wende gleich sind, ist ihre Dauer gleich und die Wende kann symmetrisch sein. Ist dies nicht der Fall, werden die Koppelnavigation und die Fährtenverlegung auf jedem Privatschlag gemäß den Instrumentendaten durchgeführt. Wenn es keine Verzögerung gibt, wird empfohlen, die Geschwindigkeit bei jeder Wende zu bewerten.
Beim Wenden kann es vorkommen, dass der Steuermann auf Anweisung des Kapitäns der Yacht beim Aussteigen in den Wind nicht auf den Kompass achtet. Hierbei werden in kleinen, aber gleichen Zeitintervallen (15 – 30 Minuten) der durchschnittliche QC und der entsprechende IC ermittelt und aufgezeichnet, wonach die durch die Verzögerung oder Geschwindigkeit gewonnenen Daten beiseite gelegt werden. Bei instabilem Wind gibt der Steuermann nicht den Kurs vor, sondern stellt die Aufgabe, das Segel auf der Suche nach dem Wind zu führen und dabei möglichst nah am allgemeinen Kurs zu bleiben. In einer solchen Situation kann es je nach den örtlichen Gegebenheiten und der Wettervorhersage manchmal von Vorteil sein, vom allgemeinen Kurs abzuweichen, um früher einen vollständigen, gleichmäßigen Wind zu bekommen (z. B. eine Brise vor der Küste). In all diesen Fällen werden im Interesse der Koppelnavigation alle Wendungen auf der Yacht und bei jeder Wende (zu Beginn und am Ende der Wende ist dies obligatorisch) mit einer bestimmten Häufigkeit (1-2 Mal pro Stunde, je nachdem) aufgezeichnet über Bedingungen), Daten über die Bewegung des Schiffes (Zeit, Kurs, Geschwindigkeit, Verzögerungsanzeige). Diese Aufzeichnungen werden verarbeitet, indem der Kurs und die Geschwindigkeit jeder Wende gemittelt und dann auf der Karte aufgezeichnet werden.
Die Praxis zeigt, dass die Genauigkeit der Berechnung unter solchen Bedingungen mit zunehmender Diskretion der Beobachtungen zunimmt. Approximationsfehler gekrümmter Navigationsabschnitte durch gerade Linien sind im Vergleich zu anderen Fehlern unbedeutend.
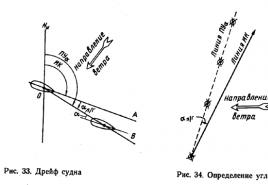
Schiffsdrift. Bei der Driftnavigation ( "A") ist die Abdrift des Schiffes von der Kurslinie unter der kombinierten Wirkung des Windes und der durch ihn verursachten Wellen. Beim Driften bewegt sich das Schiff relativ zum Wasser unter der kombinierten Wirkung der Schiffsmaschinerie und des Windes. Die Linie seiner tatsächlichen Bewegung (OV), die als Kurslinie des Schiffes während der Drift bezeichnet wird, stimmt nicht mit dem Kurs des Schiffes (OA) überein. (Siehe Abbildung 33). Wenn die Spur nach rechts verschoben wird DP Schiff (Wind weht nach Backbord) A Es wird ein Pluszeichen (+) zugewiesen, und wenn es nach links verschoben wird (der Wind weht nach Steuerbord), wird ein Minuszeichen (-) zugewiesen. Der Zusammenhang zwischen dem Spurwinkel unter Berücksichtigung der Drift ( PUa), IR Und A:
PUa \u003d IR + a; IR \u003d PUa - a; a = PUa – IR

Der Driftwinkel kann durch Vergleich der aus den Beobachtungen gewonnenen tatsächlichen Bahn des Schiffes mit ermittelt werden IR. Beim Verfolgen in Sichtweite der Küste werden eine Reihe zuverlässiger Navigationsbeobachtungen gemacht. Durch die Verbindung der beobachteten Punkte erhalten sie die Linie der tatsächlichen Bewegung des Schiffes, also die Spurlinie beim Driften PUa(Abb. 34). Der Winkel zwischen der Gleislinie und der auf der Karte eingezeichneten Linie IR entspricht dem Driftwinkel. Der gefundene Driftwinkel wird mit seinem Vorzeichen bei der weiteren Berechnung berücksichtigt. Wenn im Navigationsbereich eine Strömung herrscht, ist der resultierende Driftwinkel das Ergebnis der Einwirkung nicht nur des Windes, sondern auch der Strömung auf das Schiff.
Berücksichtigung von Kalkulationsabweichungen. Wenn das Schiff driftet, wird beim Plotten die Linie der Schiffsspur während der Drift auf der Karte eingezeichnet. Sie schreiben darauf QC, Kompasskorrektur und Driftwinkel berücksichtigt A mit Deinem Schild. Die entlang der Verzögerung zurückgelegte Distanz wird entlang der Pfadlinie aufgetragen Sl. Es wird angenommen, dass bei A
Sl \u003d Cl (ol2 - ol1); (Wo ol2- Countdown der Verzögerung am Standort des Schiffes, ol1- Countdown der Verzögerung am Startpunkt, cl- Verzögerungsfaktor).
Wenn sich der Navigator über die Genauigkeit des Driftwinkels nicht sicher ist, wird zur Kontrolle der Navigationssicherheit zusätzlich zur Spurlinie während der Drift empfohlen, eine Linie auf der Karte zu zeichnen IR. Beide Linien müssen frei von Unterwasserhindernissen sein. Die Berechnung erfolgt nur entlang der Gleislinie, entlang der sich das Schiff bewegt.
MEERSTRÖMUNGEN. Meeresströmungen sind die horizontalen Bewegungen großer Wassermassen. Die Strömung wird durch ihre Elemente charakterisiert: Richtung und Geschwindigkeit. Aktuelle Richtung ct werden in Grad in einer kreisförmigen Zählung oder Rhumbs angegeben und entsprechend dem Punkt am Horizont eingestellt, auf den die Strömung gerichtet ist. Momentane Geschwindigkeit Vt gemessen in Knoten und seine kleinen Geschwindigkeiten - in Meilen pro Tag. Je nach Art des Flusses werden sie in Konstanten eingeteilt, deren Elemente sich von Jahr zu Jahr fast nicht ändern, in periodische, deren Elemente sich nach einem bestimmten Gesetz ändern, und in temporäre (zufällige), deren Elemente kann sich dramatisch ändern. In der Praxis muss sich der Navigator am häufigsten mit konstanten und periodischen (Gezeiten-)Strömungen auseinandersetzen. Informationen über die Elemente von Dauer- und Gezeitenströmungen finden Sie in Segelanweisungen, Strömungsatlanten und auf Karten. Gleichzeitig werden die Durchschnittswerte der Strömungselemente angegeben, die erheblich von den tatsächlichen abweichen können. Die Bewegung des Schiffes relativ zum Boden beim Schwimmen in der Strömung wird durch folgende Faktoren bestimmt (Abb. 36).

Unter der Wirkung von Schiffsmotoren bewegt sich das Schiff relativ zum Wasser in seine Richtung DP, also die Linien des wahren Verlaufs von OA. Die Geschwindigkeit des Schiffes durch das Wasser ist die Geschwindigkeit Vl wird durch die Verzögerung angezeigt. Gleichzeitig wird das Gefäß zusammen mit der gesamten Wassermasse relativ zum Boden in Strömungsrichtung des OD mit der Strömungsgeschwindigkeit mitgerissen Vt. Infolgedessen bewegt sich das Schiff relativ zum Boden entlang des resultierenden OB mit einer Geschwindigkeit, die als wahre Geschwindigkeit des Schiffes bezeichnet wird V. Dabei DP Das Schiff bleibt parallel zur Linie IR. Die Linie OB, entlang der sich das Schiff unter der kombinierten Wirkung der Schiffsmaschinerie und der Strömung bewegt, wird als Linie der Schiffsspur auf der Strömung bezeichnet. Die Position der Spur relativ zum wahren Meridian wird durch den Winkel NOB bestimmt, der als Kurswinkel zur Strömung bezeichnet wird. PU. Ecke "" , eingeschlossen zwischen der Linie des wahren Schiffskurses OA und der Kurslinie OB, wird Driftwinkel genannt. Wenn das Schiff rechts davon abgerissen wird DP(der Strom wird nach links gerichtet) wird das „+“-Zeichen zugewiesen, bei Drift nach links wird das „-“-Zeichen zugewiesen. Abhängigkeit zwischen ( PU), IR Und :
PU = IR +; IR \u003d PU -; = PU - IR
ZAHL, WENN SIE AUF DEM STROM SCHWEBEN. Beim Fahren in konstanter Strömung wird auf der Karte die Bahnlinie des Schiffes eingezeichnet, entlang der es sich tatsächlich relativ zum Boden bewegt. Oben ist die Weglinie eingraviert QC, Kompasskorrektur und Driftwinkel mit eigenem Vorzeichen. Für Hilfsberechnungen wird auch eine Linie mit einer dünnen Linie gezeichnet IR, entlang derer Abstände aufgetragen sind Sl, die das Schiff gemäß den Angaben im Logbuch relativ zum Wasser passiert hat. Auf der Linie erhaltene Punkte IR, werden in Fließrichtung auf die Gleisstrecke übertragen (Abb. 37). Zählbare Punkte auf der Streckenlinie sind mit Zeit- und Verzögerungswerten markiert, und an den entsprechenden Punkten auf der Kurslinie gibt es nur Verzögerungswerte. Auf die Pfadlinie werden Verfahr-, Öffnungs- und Ausblendpunkte von Orientierungspunkten angewendet (Abb. 38).


BERECHNUNG MIT GEMEINSAMER BUCHHALTUNG FÜR DRIFT UND CURRENT. Betrachten wir den Fall, dass sich das Schiff unter der kombinierten Wirkung von Schiffsmotoren, Wind und Strömung relativ zum Boden bewegt. Um die Berechnung auf der Karte beizubehalten, zeichnen Sie die Linie des Schiffsweges während der Drift und Strömung ein und zeichnen Sie sie ein QC, Kompasskorrektur und Gesamtdriftwinkel
c = a + .
Darüber hinaus wird für Hilfsberechnungen auch eine Driftspur auf der Karte angelegt, entlang derer die Fahrt des Schiffes entlang des Baumstamms verschoben wird. Sl. Jeder Punkt auf der Driftspur entspricht einem Punkt auf der Linie der tatsächlichen Schiffsbewegung. Diese Punkte sind durch den Flussvektor miteinander verbunden. Grafisch gesehen handelt es sich um Aufgaben im Zusammenhang mit dem Finden der Spurlinie auf der Karte während der Drift und der aktuellen, wahren Geschwindigkeit V und Gesamtdriftwinkel Mit entsprechend gegeben QC, Vl, A, und Elemente des Flusses, Zeichnen eines nummerierten Ortes, Vorberechnen der Zeit und ol Wenn sie an einem bestimmten Punkt ankommen und einen Orientierungspunkt überqueren, entscheiden sie sich auf die gleiche Weise wie beim Schwimmen in der Strömung, aber beim Driften werden alle Hilfskonstruktionen auf der Gleislinie angebracht und ersetzen die Linie IR.
SCHÄTZUNGEN DER GENAUIGKEIT DER ZAHL. Durch die Auswirkung unberücksichtigter Fehler stimmen der tatsächliche Weg des Schiffes und die von ihm zurückgelegte Strecke (Reise) nicht mit denen überein, die bei der Berechnung auf der Karte berücksichtigt wurden, und die tatsächliche Position des Schiffes stimmt nicht überein das berechnete. Für eine ungefähre Beurteilung der Fehler in der Berechnung können Sie die folgenden Daten verwenden, die die gesammelten allgemeinen Navigationserfahrungen und die durchgeführten Studien widerspiegeln. Die Dauer der Reise (Stunden) entspricht dem radialen quadratischen Mittelfehler, % aus S:
Bis zu 3 Stunden - 10 %; 3–6 Stunden – 9 %; 6-10h - 8%; 10-14h - 7%; 14-18h - 6%; 18-23h - 5%; 23-25h - 4%; mehr als 35 Stunden - 3 %.
Bei der Festlegung der Schiffsroute auf der Karte in einem bestimmten Abstand zu Navigationshindernissen muss die Möglichkeit einer Abweichung des Schiffes von der Routenlinie berücksichtigt werden, und der Abweichungswert nimmt mit zunehmender zurückgelegter Distanz zu, insbesondere beim Fahren mit Drift und aktuell. Die unzureichende Genauigkeit der Berechnung erfordert eine zusätzliche Kontrolle der Position des Schiffes, d. h. die Bestimmung seines Standorts nicht nur durch Berechnung, sondern auch durch Beobachtungen: navigatorisch, astronomisch oder mithilfe von GPS.
§ 26. Grafische und schriftliche Berechnung der Schiffsroute
Allgemeine Informationen. Als Verlegung wird bezeichnet, die ohne Überprüfung der Position des Schiffes durch Bestimmung seines Standorts an Küstenobjekten oder an Himmelskörpern durchgeführt wird Schiffsabrechnung. Die auf der Karte nach der Methode grafischer Konstruktionen durchgeführte Berechnung wird aufgerufen Grafik Koppelnavigation des Schiffsweges und durchgeführt anhand von Berechnungen mit speziellen Formeln - geschrieben(analytisch).Grafische Abrechnung. Der Kern dieser Methode ist wie folgt. Im Moment der Bestimmung des Startpunktes a“ (siehe Abb. 29) notieren sie neben der Uhrzeit auch die Schiffsuhr (bis 1 Minute) und die Nachlaufzählerstände (bis 0,1 Meilen). Der Startpunkt a“ ist eingekreist und daneben wird an einer freien Stelle eine Inschrift als Bruch angebracht: Zähler – Zeit, Nenner – Verzögerungswerte 18,00 / 2,5 Wenn der beobachtete Punkt a „nahe genug am Startpunkt a liegt, dann von Punkt a“ eine erste Kurslinie wird in Form einer Geraden parallel zur Linie ac gezeichnet. Danach wird die Linie ac aus der Karte gelöscht, und auf der neu gezeichneten Linie wird die Gradzahl des Kompasskurses eingeschrieben und anschließend in Klammern die für diesen Kurs berechnete allgemeine Korrektur des AK-Kompasses, damit dies möglich ist Es muss immer festgestellt werden, welcher Kurs festgelegt wurde.
Wenn der beobachtete Punkt a so weit vom Punkt a entfernt ist, dass die Schiffsspur nahe an den Gefahren vorbeiführt (gestrichelte Linie in Abb. 29), wird ein neuer Kurs festgelegt, wie oben in § 25 gezeigt.
Auf der Weglinie sind stündlich die nummerierten Plätze des Schiffes markiert. Dazu wird die vom Schiff in 1 Stunde zurückgelegte Strecke im Kartenmaßstab meterweise auf dem Schiffsweg vom Startpunkt aus aufgetragen. An der durch das Messgerät markierten Stelle wird eine Kerbe in Form einer kurzen geraden Linie senkrecht zur Gleislinie sowie eine Beschriftung der Zeit- und Verzögerungswerte angebracht.
Wenn das Schiff die Bewegungsrichtung ändern muss, werden zum Zeitpunkt der Kursänderung erneut die Zeit und der Countdown der Verzögerung notiert. Nachdem Sie die vom letzten zählbaren Punkt an zurückgelegte Reise berechnet haben, legen Sie sie entlang des Weges ab, markieren Sie den Wendepunkt mit einem Datensatz in Form eines Bruchs (04,37 / 70,2) und zeichnen Sie von diesem Punkt aus einen neuen Kurs. Wenn das Schiff aus irgendeinem Grund am Punkt c landet, der deutlich weit von dem durch die vorläufige Verlegung markierten Punkt c entfernt ist, wird ein neuer Kurs gelegt, um Punkt d der zweiten Kurve zu erreichen. Danach folgt die CD-Linie wird ebenfalls von der Karte gelöscht, und auf der Linie c „d“ tragen Sie die Gradzahl KK ein und anschließend in Klammern die allgemeine Korrektur des AK-Kompasses für DIESEN Kurs.
Durch die Beibehaltung einer grafischen Verlegung erhält der Navigator eine visuelle Darstellung der Position des Schiffs im Verhältnis zu Navigationsgefahren.
Die Genauigkeit der Aufzeichnung hängt davon ab, wie korrekt der Kurs aufgezeichnet und die zurückgelegte Strecke berücksichtigt wird. Die Dichtungsgenauigkeit wird durch die folgende Formel ausgedrückt:
wo Slo - der Wert der vom Schiff durchgeführten Navigation;
Ek ist der Fehler der gesamten Kompasskorrektur;
Es – Fehler bei der Verzögerungskorrektur, %.
Beispiel 26. Bestimmen Sie den Radius des Kreises, innerhalb dessen sich die Position des Schiffes befinden sollte, das einen Kurs von 60 Meilen zurückgelegt hat, wenn der mögliche Fehler im Kurs ±1° beträgt und der mögliche Fehler in der Verzögerungskorrektur (-2,0 %) beträgt. .
Lösung. Nach Formel (31)
Das Drehen des Schiffes von einem Kurs auf einen anderen bringt einige zusätzliche Fehler in die Verlegung mit sich, da das Schiff nach dem Ruderwechsel nicht sofort die Bewegungsrichtung ändert, sondern eine bestimmte Kurve (Zirkulation) durch den Schwerpunkt beschreibt.
Beim Segeln in engen Gewässern, engen Räumen, Schären usw. ist die Berücksichtigung der Zirkulation von großer Bedeutung. Die Zirkulation wird wie folgt berücksichtigt.
Das Schiff (Abb. 30), das in Richtung K1 folgt, muss am Punkt A in Richtung K2 drehen (der Drehwinkel beträgt a). Um die Zirkulation zu berücksichtigen, wird eine Winkelhalbierende des inneren Rotationswinkels gezeichnet (3 = 180 ° -a) und darauf wird nach dem Mittelpunkt O des Kreises mit einem Radius gesucht, der dem halben taktischen Durchmesser der Zirkulation Dc entspricht wird empirisch ermittelt und üblicherweise in der Länge des Schiffsrumpfs ausgedrückt.
Nachdem Sie einen Kreis gezeichnet haben, markieren Sie die Punkte B und C seiner Berührung mit den Linien K1 und K2. Punkt B gilt als Beginn der Runde.
Schriftliche Abrechnung. Die Berechnungsposition des Schiffes kann durch die analytische Methode der schriftlichen Berechnung in den Fällen ermittelt werden, in denen es irrational ist, die grafische Berechnung der Schiffsroute zu verwenden: beim Segeln in hohen Breiten, bei der Eisschifffahrt, beim Walfang usw.

Reis. dreißig.
Der Kern der schriftlichen Abrechnung besteht darin, die Koordinaten des Ankunftsortes mit bekannten Koordinaten des Abfahrtsortes, dem Kurs und der Navigation des Schiffes zu bestimmen. Mit Hilfe der schriftlichen Abrechnung ist es möglich, das umgekehrte Problem zu lösen: aus den bekannten Koordinaten der Ankunfts- und Abfahrtspunkte die Navigation und den Kurs des Schiffes zu bestimmen.
Basierend auf den Formeln (4) und (5) können die Koordinaten des Ankunftsortes wie folgt ausgedrückt werden:

Findet die Navigation in niedrigen Breiten statt, so lassen sich die Ausdrücke für RH und RH leicht aus der Berücksichtigung der sogenannten ermitteln Navigationsdreieck ABC (Abb. 31), in dem:
A – Ausgangspunkt mit den Koordinaten cp1 und L2;
B – Ankunftspunkt mit den Koordinaten cp2 und L2;
K \u003d LSAB - Schiffskurs beim Bewegen von Punkt A nach Punkt B;
AB=S – Entfernung zwischen Abfahrts- und Ankunftspunkt;
AC=RSh und VS=OTSH.
Wenn wir davon ausgehen, dass das Dreieck ABC flach und rechteckig ist, dann ergibt sich direkt aus Abb. 31 erhalten wir:

Wenn wir außerdem den Wert von OT W aus Formel (6) einsetzen, erhalten wir
Tatsächlich ist AABC weder flach noch rechteckig (die Figur ACBC ist ein sphärisches Trapez). Daher ist RD1 = = RD2 (cpB = cpA), sondern der reale Wert
Wo
![]()
- durchschnittlicher Breitengrad.
Um die Arbeit des Navigators im MT-63 zu erleichtern, gibt es Hilfstabellen: Tab. 24 gibt die RSH- und RSH-Werte für die Argumente S (Schwimmen) und K (Kurs) an; Tab.
25-a – RD-Werte in Bezug auf φm und RNR.

Reis. 31.
Erfolgt die Berechnung auf dem Übergang des Schiffes auf demselben Kurs, spricht man von einfach, bei mehreren Kursen von zusammengesetzt. Beim Schwimmen in der Strömung, insbesondere bei Gezeiten, kommt die zusammengesetzte Berechnung zum Einsatz; in diesem Fall wird die Lehrveranstaltung als separate Zusatzveranstaltung(en) berücksichtigt. Bei der zusammengesetzten Berechnung werden RSH und RD für jede einzelne Strecke und jedes Schwimmen berechnet oder aus Tabellen ausgewählt. Wenn wir die algebraische Summe aller RSH und OSH bilden, erhalten wir den allgemeinen RSH und den allgemeinen OSH. Berechnen Sie als Nächstes den Breitengrad des Ankunftspunkts mithilfe der Formel
φ2 = φ1 + allgemeines PSH
Und die allgemeine Formel
Beim Segeln befindet sich das Schiff an der Grenze zweier Umgebungen – Luft und Wasser, deren Bewegung es beeinflusst, vom Kurs abweicht und die Bewegungsgeschwindigkeit ändert.
Die Abdrift eines Schiffes durch den Wind nennt man Drift. Wind ist die Vorwärtsbewegung von Luftmassen. Die Windrichtung ist die Richtung (in Grad), aus der der Wind weht. Die Windgeschwindigkeit wird in Metern pro Sekunde oder in Punkten gemessen.
Abb.1
Sei V0 die Geschwindigkeit des Schiffes relativ zum Wasser aufgrund der Arbeit seiner eigenen Propeller (Abb. 1). Der Luftwiderstand gegen die Schiffsbewegung wird vom Beobachter auf dem Schiff als Gegenströmung der Luft wahrgenommen, deren Geschwindigkeitsvektor (-V0) ist. Seien Sie der wahre Windgeschwindigkeitsvektor. Der gegenläufige Luftstrom und der wahre Wind ergeben zusammen eine auf einem fahrenden Schiff beobachtete Gesamtströmung, die als scheinbarer (beobachteter) Wind bezeichnet wird. Der scheinbare Windgeschwindigkeitsvektor ist gleich der geometrischen Summe:
W \u003d u + (-V0) \u003d u - V0.
Die scheinbare Windgeschwindigkeit wird automatisch mit einem Anemorumbometer oder manuell mit einem Anemometer bestimmt, die Richtung KW wird mit einem Anemorumbometer oder in Richtung einer Flagge oder eines Wimpels bestimmt. Scheinbarer Wind. Inaktiv auf dem Schiff bei einem Kurswinkel qW bewirkt es, dass die gesamte aerodynamische Kraft P auf die Mitte der Seitenwindung des Schiffes wirkt. Aufgrund der Brechungseigenschaften des Überbaus stimmt die Richtung der Kraft P im allgemeinen Fall nicht mit der Richtung des scheinbaren Windes überein. Unter Einwirkung der Kraft P wird das Schiff mit der Driftgeschwindigkeit VDR in Richtung dieser Kraft verschoben.
Zerlegen wir die Geschwindigkeit VDR in die Komponenten VDR X entlang der diametralen Ebene und VDR Y entlang der Traverse. Die Geschwindigkeit VDR X wird je nach Richtung des scheinbaren Windes von der Geschwindigkeit V0 subtrahiert oder addiert. Wenn die Verzögerung funktioniert, wird diese Geschwindigkeit berücksichtigt. Deshalb
Vl \u003d V0 + VDR X.
VDR Y-Geschwindigkeit weicht das Schiff vom eingestellten Kurs ab. Nachdem wir die Geschwindigkeit des Schiffes Vl geometrisch mit der Geschwindigkeit VDR Y addiert haben, erhalten wir den Vektor V der tatsächlichen oder Bodengeschwindigkeit des Schiffes:
V \u003d Vl + VDR Y.
Wie Sie sehen, bewegt sich das Schiff bei Addition der Geschwindigkeiten Vl und VDR Y in Richtung ihrer Resultierenden.
Die Linie, entlang der sich das Schiff unter der Wirkung von Antrieben und dem scheinbaren Wind tatsächlich relativ zum Meeresboden bewegt, wird als Driftbahn bezeichnet. Die diametrale Ebene des Schiffes bleibt bei der Bewegung entlang der Spurlinie parallel zur wahren Kurslinie. Dies liegt daran, dass der Steuermann ständig einen vorgegebenen wahren Kurs beibehält. Folglich bewegt sich das Schiff nicht mit dem Bug, sondern mit dem Wangenknochen auf dem Weg vorwärts.
Der Winkel in der Ebene des wahren Horizonts zwischen dem nördlichen Teil des wahren Meridians und der Spurlinie während der Drift wird als Spurwinkel während der Drift PU bezeichnet.
Der Winkel in der Ebene des wahren Horizonts zwischen den Linien des wahren Kurses und der Spur beim Driften wird Driftwinkel genannt. Wenn der Wind auf der Backbordseite des Schiffes weht, ist der Driftwinkel positiv (der Kurswinkel während der Drift ist größer als der wahre Kurs). Bei Wind von der Steuerbordseite ist der Driftwinkel negativ (der Kurswinkel während der Drift ist kleiner als der wahre Kurs).
Der Driftwinkel hängt von der Geschwindigkeit und dem Kurswinkel des scheinbaren Windes, von der Geschwindigkeit und den Konstruktionsmerkmalen des Schiffes ab: der Höhe und Architektur der Aufbauten, dem Oberflächenteil des Rumpfes und der Form der Rumpfkonturen. Der Driftwinkel wird mit einem Driftmeter gemessen. Wenn dieses Instrument nicht vorhanden ist, werden Driftwinkel für verschiedene Navigationsbedingungen aus einer Drifttabelle ausgewählt, die aus experimentellen Daten zusammengestellt wurde. Aus Abb. 1 ist sichtbar:
Formeln - Algebra, Winkel? wird mit seinem Vorzeichen genommen.
In der Praxis der Schiffsnavigation müssen hauptsächlich zwei Probleme gelöst werden, die mit der Drift des Schiffes zusammenhängen. Direkte Aufgabe:
Den Bodenwinkel berechnen, wenn die Trägerrakete driftet? (Spur des Schiffes beim Driften), wenn der wahre Kurs eingestellt ist.
Um dieses Problem zu lösen, benötigen Sie:
- Vorzeichen des Driftwinkels bestimmen?;
— den Kurswinkel qW des scheinbaren Windes berechnen;
— Winkelwert wählen? aus der Drifttabelle nach Argumenten: nach Schiffsgeschwindigkeit und qW;
- Berechnen Sie den Spurwinkel während der Drift des Werfers. Legen Sie die Spur auf die Karte.
KK = 79,0°; Vl = 12,0 Knoten;
?GK = + 1,0°; Wind 5° -12 m/s.
Lösung:
Der Wind weht zur Backbordseite des Schiffes – Winkel? positiv:
IR = KK + ?GK = 80,0°;
? = +4,0°; PU? = IR + ? = 84,0°.
2. Anlegen einer echten Funkpeilung für den Fall, dass sich das Funkfeuer außerhalb der östlichen oder westlichen Grenzen des Kartenrahmens befindet.
Um die Position des definierenden Punkts (Punkt M') zu finden, durch den die Funkpeilung auf dem KRMK (Punkt A) gezeichnet wird, ist es notwendig:
1) ? aus „RTSNO“ die Koordinaten von KRMKA (? A,? A) ausschreiben;
2) ? Wert berechnen? ? = ?Р – ?А, wo? Р – Längengrad des Seitenrahmens der Karte;
3) ? Zeichnen Sie eine Parallele von KRMKA auf der Karte (? A – von „RTSNO“) und legen Sie das Segment beiseite;
4) ? durch t. A „um einen zusätzlichen Meridian aa zu zeichnen;
5) ? von t. A’ halten Lok. P KRMKA A bis zur Kreuzung mit aa - t. M;
6) ? von t. M entlang aa ein Segment beiseite legen und durch den erhaltenen Punkt M 'eine Funkpeilung auf KRMK A zeichnen? Dies ist die gewünschte Positionslinie (I–I).
Die Bestimmung der Schiffsposition durch Berechnung seiner aktuellen (zählbaren) Koordinaten aus den bekannten Anfangskoordinaten entlang des Kurses, der Geschwindigkeit unter Berücksichtigung von Drift, Drift und Zeit wird als Berechnung der Schiffskoordinaten bezeichnet ( Koppelnavigation ) oder abgekürztAbrechnung .
Es werden die Koordinaten des berechneten Ortes des Schiffes aufgerufen abzählbare Koordinaten und sind gekennzeichnet:
φ MIT - Rechenspielraum;
λ MIT - zählbarer Längengrad.
Zählbarer Ort - die Position des Schiffes, bestimmt auf der Grundlage der Berechnung der Koordinaten seiner Position.
Abrechnungsauftrag ist die Ausrichtung des Schiffes relativ zum Gelände mit einer Genauigkeit, die die Navigationssicherheit seiner Navigation gewährleistet.
Als Linie bezeichnet man die Linie, entlang der sich das Schiff unter dem Einfluss von Antrieb, Wind und Strömung tatsächlich bewegt Spurlinie.
Das Wesen der Nummerierung besteht darin, dass von einem bekannten Startpunkt auf der Navigationskarte aus die Bewegungsrichtungen des Schiffes und die dabei zurückgelegten Strecken aufgezeichnet werden, um seine Position zu einem bestimmten Zeitpunkt zu ermitteln.
Abrechnung Schiffskoordinaten klassifiziert:
Nach Zählmethode :
Grafik , basierend auf der kontinuierlichen Abrechnung der Elemente der Ziffer und ihrer Darstellung auf der Navigationskarte;
analytisch , basierend auf der Berechnung der aktuellen Koordinaten nach bestimmten mathematischen Abhängigkeiten.
Nach Automatisierungsgrad :
automatisch mit Hilfe spezieller Computer (Autoplotter, Autonumerator usw.) erstellt;
Beobachtungs , automatische Berechnung basierend auf der kontinuierlichen Aktualisierung der aktuell errechenbaren Koordinaten durch externe Orientierungspunkte;
Handbuch , erstellt mit Hilfe graphanalytischer Aktionen, die manuell oder mithilfe von Tabellen durchgeführt werden.
Anforderungen an die Koppelnavigation
Zur Abrechnung die folgende Anforderungen:
Berechnung sollte sein ständig jederzeit die Position des Schiffes (seine aktuellen Koordinaten) relativ zum Gelände zu kennen;
Abrechnung sollte sein präzise Gewährleistung der Navigationssicherheit und Lösung der mit diesem Schiff verbundenen Probleme;
Abrechnung sollte genügen einfach und visuell.
Die bevorzugte Methode zur Berücksichtigung von Schiffsbewegungen ist automatisch mit obligatorischer manueller grafischer Abrechnung, was im Wesentlichen alle Voraussetzungen für eine Abrechnung erfüllt.
Auch bei modernen Navigationssystemen, bei denen der Berechnungsprozess vollautomatisch abläuft und eine hohe Genauigkeit aufweist, ist eine manuelle grafische Berechnung zwingend erforderlich, um bei Fehlfunktionen der Instrumente Fehler zu kontrollieren und auszuschließen.
Die manuelle grafische Berechnungsmethode wird oft als Navigationspad bezeichnet, obwohl letzteres → das Konzept weiter gefasst ist (+ Orte bestimmen usw.).
Navigationsverlegung der Schiffsroute – grafische Konstruktionen auf der Seekarte bei der Lösung von Navigationsproblemen.
Zu lösende Aufgaben mit manueller grafischer Koppelnavigation
In Abwesenheit von Wind und Strömung bewegt sich das Schiff relativ zum Meeresboden nur unter dem Einfluss seines eigenen Antriebs.
Wenn wir das Gieren des Schiffes (Abweichungen des Steuermanns vom ihm vorgegebenen Kurs) vernachlässigen und die Korrektur des Kursindikators als konstant betrachten, wird die Kurslinie des Schiffes auf der Navigationskarte als gerade Linie dargestellt mit der Richtung des wahren Kurses übereinstimmt.
Schiffsweg - die Bewegungsrichtung des Schiffsschwerpunkts, gemessen durch den horizontalen Winkel zwischen dem nördlichen Teil des wahren Meridians und der Kurslinie des Schiffs im Uhrzeigersinn von 0° bis 360° (kreisförmiges Zählsystem).
Schiffsspur - die Linie, entlang der sich der Schwerpunkt des Schiffes relativ zum Meeresboden bewegt(Abb.5.3).
Reis. 5.3. Gleislinie und Schiffsgleis
Mit der manuellen grafischen Berechnung der Schiffskoordinaten, ohne Berücksichtigung von Drift und Strömung, werden folgende Aufgaben gelöst:
Berechnung und Festlegung wahrer Kurse;
Berechnung und Festlegung der vom Schiff zurückgelegten Distanzen;
Bilanzierung der Zirkulation - Änderungen im Schiffsverlauf.
Bei der Abrechnung werden die Messwerte der Instrumente verwendet:
Verstärker Kursindikator(Magnetkompass, Kreiselkompass usw.) – QC;
Verstärker Verzögerung(Werte V L Und OL);
Drehzahlmesser(N U/min – die Anzahl der Propellerumdrehungen);
Schiffsuhr (aktuelle Zeit).
Als Ausgangspunkt für den Beginn der Koppelnavigation wird die Position des Schiffes vor Anker (Fass, am Liegeplatz) herangezogen, die durch Beobachtungen von Küstenlandmarken oder durch Koppelnavigation ermittelt wird (Abb. 5.4).

Reis. 5.4. Registrierung der grafischen Berechnung der Schiffsroute auf der Routenkarte
1. Durch zählbare Koordinaten ( φ MIT , λ MIT) Wir platzieren den Ankerplatz, in dessen Nähe wir an einem freien Ort die Zeit des Schießens vom Anker aus und den vollständigen Stand des Verzögerungszählers aufzeichnen ( OL 0 ):
In allen Fällen wird der Bruchstrich der Eingabe ausgeführt entlang eines Lineals und parallel zu einer Parallele.
2. Vom Ankerpunkt aus zeichnen wir die Richtung der wahren Kurslinie, berechnet nach der Formel:
Wenn der Kurs von einem Kreiselkompass stammt, dann
Wenn der Kurs von einem Magnetkompass stammt, dann
|
IR = QC MK + Δ MK |
|
Δ MK = d + δ |
– Korrektur des Magnetkompasses.
Oberhalb des Ankerpunkts wahre Kurslinie (Spurlinie) die Inschrift erfolgt:
QC ist die Abkürzung für den Kompasskurs ( GKK, KK GL , KK P);
127,0 ° - der dem Steuermann angegebene Wert des Kompasskurses (Gleichheitszeichen zwischen QC und 127,0° ist nicht regelkonform eingestellt);
(+2,0°) – der Wert und das Vorzeichen der angenommenen Korrektur des Kursindikators werden in Klammern angegeben.
Die Beschriftung über der Kurslinie ermöglicht Ihnen die Kontrolle :
Korrektes Einhalten des eingestellten Kurses (127,0°) durch den Steuermann;
Der Wert der akzeptierten und berücksichtigten Korrektur des Kursindikators (+2,0 °);
Die Richtigkeit der Richtung der wahren Kurslinie auf der Karte (129,0 °).
Wenn das Schiff einem vorgegebenen Kurs folgt, vergleicht der Steuermann regelmäßig (alle 15 Minuten) die Messwerte der Kurse mit dem Hauptkursindikator (gemäß GC oder von GA oder andere) und Verwendung eines Magnetkompasses mit Meldung an den Wachkapitän (den Wachoffizier).
Die zählbaren Koordinaten des Schiffes werden im Schiffstagebuch festgehalten :
beim Schießen eines Schiffes vom Anker (Fass) und beim Ankern (Fass);
beim Segeln mit Koppelnavigation, zu Stunden, die ein Vielfaches des 4. sind (00, 04, 08 ... 20);
jede Stunde, wenn das Schiff per Koppelnavigation in Küstennähe fährt;
beim Wechsel der Navigationswache und in anderen Fällen nach Anweisung des Kapitäns.
Die nummerierte Position des Schiffes wird auf der Navigationskarte eingetragen :
in durch vier teilbaren Stunden (00, 04 ... 20);
wenn das Schiff seinen Kurs oder seine Geschwindigkeit ändert;
beim Wechsel der Navigationswache (Laufwache);
stündlich, wenn das Schiff in Küstennähe oder in eingeschränkten Gewässern fährt, und in anderen Fällen nach Anweisung des Kapitäns.
Um einen absehbaren Ort für eine bestimmte (aktuelle) Zeit zu finden, gehen Sie wie folgt vor (Abb. 5.4):
Zeichnen Sie die Ablesungen der Schiffsuhr auf ± 1 Minute genau auf (11.00) ;
Verzögerungsanzahl korrigieren ( OL 1 ) auf 0,1 Meile genau (60,4) ;
(Für V L= 18 Knoten → ZU L = 1,02)S L= 1,02 11,8 = 12,0 Meilen.
S UM =12,0 Meilen
unter der Vorraussetzung, dass S L =S UM → Legen Sie seinen Wert (im Kartenmaßstab) vom Startpunkt entlang der wahren Kurslinie beiseite und zeichnen Sie die berechnete Position des Schiffes (um 11.00 Uhr) mit einem Symbol ( Hublinie IR ~ 5 mm).
Schreiben Sie neben die Stelle, die gezählt werden soll, als Bruch ![]()
Bei der Abrechnung wird es oft notwendig Kennen Sie die Zeit und den Countdown der Verzögerung der Ankunft des Schiffes an einem bestimmten Punkt(Treffpunkt, Ankerpunkt usw.).
Ein solcher Punkt kann gesetzt werden (Abb.5.5):

Reis. 5.5. Möglichkeiten, einen Punkt auf der Karte festzulegen
Koordinaten ( φ, λ );
Richtung zum Wahrzeichen ( IP oder KU);
Distanz ( D) zum Wahrzeichen usw.
Das Verfahren zur Lösung des Problems .
 Grafische Berechnung des Schiffsweges. Um die Sicherheit der Navigation beurteilen, in der Umgebung navigieren und die richtigen Kurse für die weitere Bewegung wählen zu können, muss der Navigator jederzeit die Position seines Schiffes kennen. Dazu unterhält er ein Navigationspad. Bevor das Schiff auf See geht, studieren sie unter Anleitung des Kapitäns anhand von Karten und Navigationshilfen die Navigationsbedingungen für die gesamte bevorstehende Passage. Basierend auf diesen Daten wird die Vorverlegung durchgeführt. Allerdings gibt es nur einen allgemeinen Überblick über die Übergangsbedingungen. Von dem Moment an, in dem Sie eine Reise antreten, werden die endgültige Wahl der Kurse und alle berücksichtigten Faktoren von der jeweiligen Segelsituation bestimmt. Daher wird der Flug von der ausführenden Verlegerin durchgeführt. Es umfasst Koppelnavigation, Berechnungen und Kartenerstellung sowie Manövrierberechnungen, um anderen Schiffen auszuweichen.
Grafische Berechnung des Schiffsweges. Um die Sicherheit der Navigation beurteilen, in der Umgebung navigieren und die richtigen Kurse für die weitere Bewegung wählen zu können, muss der Navigator jederzeit die Position seines Schiffes kennen. Dazu unterhält er ein Navigationspad. Bevor das Schiff auf See geht, studieren sie unter Anleitung des Kapitäns anhand von Karten und Navigationshilfen die Navigationsbedingungen für die gesamte bevorstehende Passage. Basierend auf diesen Daten wird die Vorverlegung durchgeführt. Allerdings gibt es nur einen allgemeinen Überblick über die Übergangsbedingungen. Von dem Moment an, in dem Sie eine Reise antreten, werden die endgültige Wahl der Kurse und alle berücksichtigten Faktoren von der jeweiligen Segelsituation bestimmt. Daher wird der Flug von der ausführenden Verlegerin durchgeführt. Es umfasst Koppelnavigation, Berechnungen und Kartenerstellung sowie Manövrierberechnungen, um anderen Schiffen auszuweichen.
 Koppelnavigation ist die kontinuierliche Berücksichtigung der Elemente der Schiffsbewegung (Geschwindigkeit und Richtung) und der Auswirkungen äußerer Kräfte, um die Koordinaten des Schiffes (zählbarer Ort) ohne Beobachtung von Küstenmarkierungen und Himmelskörpern (Beobachtungen) zu bestimmen. Diese Abrechnung erfolgt auf Basis der Werte Kurs, Geschwindigkeit und Driftvektor des Schiffes. Der Startpunkt für die Koppelnavigation auf der Karte wird vom Kapitän bestimmt. Für einen solchen Punkt kann die genaue Position des Schiffes, die unmittelbar nach dem Verlassen des Hafenwasserbereichs ermittelt wird, eines schwimmenden Leuchtturms, einer Empfangsboje usw. erfasst werden. Seine Koordinaten werden im Schiffstagebuch aufgezeichnet. Zu Beginn der Ausführungsverlegung sollten Sie das Protokoll einschalten und die Kompasskorrektur durch Ausrichtung oder auf andere Weise ermitteln.
Koppelnavigation ist die kontinuierliche Berücksichtigung der Elemente der Schiffsbewegung (Geschwindigkeit und Richtung) und der Auswirkungen äußerer Kräfte, um die Koordinaten des Schiffes (zählbarer Ort) ohne Beobachtung von Küstenmarkierungen und Himmelskörpern (Beobachtungen) zu bestimmen. Diese Abrechnung erfolgt auf Basis der Werte Kurs, Geschwindigkeit und Driftvektor des Schiffes. Der Startpunkt für die Koppelnavigation auf der Karte wird vom Kapitän bestimmt. Für einen solchen Punkt kann die genaue Position des Schiffes, die unmittelbar nach dem Verlassen des Hafenwasserbereichs ermittelt wird, eines schwimmenden Leuchtturms, einer Empfangsboje usw. erfasst werden. Seine Koordinaten werden im Schiffstagebuch aufgezeichnet. Zu Beginn der Ausführungsverlegung sollten Sie das Protokoll einschalten und die Kompasskorrektur durch Ausrichtung oder auf andere Weise ermitteln.
 BEIM SCHWIMMEN OHNE DRIFT UND STÖRUNG DIE NUMMER BEHALTEN. Beim Segeln ohne Drift und Strömung stimmt der Schiffsweg auf der Karte mit der IC-Linie überein, daher wird die Schiffsbewegung auf der Karte entlang der IC-Linien berücksichtigt, entlang derer die vom Schiff zurückgelegten Strecken entlang des Logbuchs aufgetragen werden, unter Berücksichtigung seines Koeffizienten Kl. Vom Startpunkt auf der Karte wird eine Linie des ersten Kurses gelegt. Die von der Karte entnommenen ICs werden auf den CC übertragen, auf dem sie entsprechend dem Magnetkompass platziert werden. Auf der Karte oberhalb der IR-Linie sind der Kompasskurs und seine Korrektur eingezeichnet. Die entlang der Strecke zurückgelegte Distanz Sl wird durch die Verzögerung bestimmt: Sl = Cl (ol 2 - ol 1); (Wobei ol 2 der Verzögerungswert am Standort des Schiffs ist, ol 1 der Verzögerungswert am Startpunkt ist, Kl der Verzögerungskoeffizient ist).
BEIM SCHWIMMEN OHNE DRIFT UND STÖRUNG DIE NUMMER BEHALTEN. Beim Segeln ohne Drift und Strömung stimmt der Schiffsweg auf der Karte mit der IC-Linie überein, daher wird die Schiffsbewegung auf der Karte entlang der IC-Linien berücksichtigt, entlang derer die vom Schiff zurückgelegten Strecken entlang des Logbuchs aufgetragen werden, unter Berücksichtigung seines Koeffizienten Kl. Vom Startpunkt auf der Karte wird eine Linie des ersten Kurses gelegt. Die von der Karte entnommenen ICs werden auf den CC übertragen, auf dem sie entsprechend dem Magnetkompass platziert werden. Auf der Karte oberhalb der IR-Linie sind der Kompasskurs und seine Korrektur eingezeichnet. Die entlang der Strecke zurückgelegte Distanz Sl wird durch die Verzögerung bestimmt: Sl = Cl (ol 2 - ol 1); (Wobei ol 2 der Verzögerungswert am Standort des Schiffs ist, ol 1 der Verzögerungswert am Startpunkt ist, Kl der Verzögerungskoeffizient ist).
 Auf den Linien des IR wird in den unten angegebenen Fällen die berechnete Rache des Schiffes angewendet, d. h. der anhand des Kurses und der Navigation berechnete Ort. Wird in Küstennähe gefahren, werden auf offener See stündlich zählbare Punkte markiert – am Ende der Wache. Darüber hinaus wird an den Punkten des Beginns und Endes von Kurven, bei Geschwindigkeitsänderungen und beim Empfang von Beobachtungen ein kalkulierbarer Ort angelegt. In der Nähe der Schiffsposition wird der Moment in Form eines Bruchteils gemäß der Schiffsuhr mit einer Genauigkeit von 1 Minute (T) und der Verzögerungswert mit einer Genauigkeit von 0,1 Meilen (ol) aufgezeichnet. (Siehe Abbildung 31).
Auf den Linien des IR wird in den unten angegebenen Fällen die berechnete Rache des Schiffes angewendet, d. h. der anhand des Kurses und der Navigation berechnete Ort. Wird in Küstennähe gefahren, werden auf offener See stündlich zählbare Punkte markiert – am Ende der Wache. Darüber hinaus wird an den Punkten des Beginns und Endes von Kurven, bei Geschwindigkeitsänderungen und beim Empfang von Beobachtungen ein kalkulierbarer Ort angelegt. In der Nähe der Schiffsposition wird der Moment in Form eines Bruchteils gemäß der Schiffsuhr mit einer Genauigkeit von 1 Minute (T) und der Verzögerungswert mit einer Genauigkeit von 0,1 Meilen (ol) aufgezeichnet. (Siehe Abbildung 31).

 Unter realen Bedingungen der Seeschifffahrt sind drei Hauptoptionen möglich, die die geeigneten praktischen Methoden zur Koppelnavigation der Yacht bestimmen: Segeln bei stabilem Vollwind; Segeln bei stabilem Gegenwind; Segeln bei Winden, die in Stärke und Richtung instabil sind.
Unter realen Bedingungen der Seeschifffahrt sind drei Hauptoptionen möglich, die die geeigneten praktischen Methoden zur Koppelnavigation der Yacht bestimmen: Segeln bei stabilem Vollwind; Segeln bei stabilem Gegenwind; Segeln bei Winden, die in Stärke und Richtung instabil sind.
 Im ersten Fall wird die Yacht in der Regel entlang der bei der Vorverlegung angelegten Trasse gefahren. Die Berechnungsbedingungen sind hier günstig. Im zweiten Fall erfolgt die Wende relativ zum allgemeinen Verlauf, während der tatsächliche Weg, der auf jeder Wende gelegt wird, nicht mit der vorläufigen Verlegung übereinstimmt. Wenn die Wende nicht zu steil ist, behält der Steuermann einen vorgegebenen Kurs genau bei, was die Berechnung vereinfacht und ihre Genauigkeit erhöht. Unter solchen Bedingungen hängt die Dauer der Wende vom Wendewinkel ab (dem Winkel zwischen dem allgemeinen Kurs und dem Kurs der Yacht). Wenn die Winkel der rechten und linken Wende gleich sind, ist ihre Dauer gleich und die Wende kann symmetrisch sein. Ist dies nicht der Fall, werden die Koppelnavigation und die Fährtenverlegung auf jedem Privatschlag gemäß den Instrumentendaten durchgeführt. Wenn es keine Verzögerung gibt, wird empfohlen, die Geschwindigkeit bei jeder Wende zu bewerten.
Im ersten Fall wird die Yacht in der Regel entlang der bei der Vorverlegung angelegten Trasse gefahren. Die Berechnungsbedingungen sind hier günstig. Im zweiten Fall erfolgt die Wende relativ zum allgemeinen Verlauf, während der tatsächliche Weg, der auf jeder Wende gelegt wird, nicht mit der vorläufigen Verlegung übereinstimmt. Wenn die Wende nicht zu steil ist, behält der Steuermann einen vorgegebenen Kurs genau bei, was die Berechnung vereinfacht und ihre Genauigkeit erhöht. Unter solchen Bedingungen hängt die Dauer der Wende vom Wendewinkel ab (dem Winkel zwischen dem allgemeinen Kurs und dem Kurs der Yacht). Wenn die Winkel der rechten und linken Wende gleich sind, ist ihre Dauer gleich und die Wende kann symmetrisch sein. Ist dies nicht der Fall, werden die Koppelnavigation und die Fährtenverlegung auf jedem Privatschlag gemäß den Instrumentendaten durchgeführt. Wenn es keine Verzögerung gibt, wird empfohlen, die Geschwindigkeit bei jeder Wende zu bewerten.
 Beim Wenden kann es vorkommen, dass der Steuermann auf Anweisung des Kapitäns der Yacht beim Aussteigen in den Wind nicht auf den Kompass achtet. Hierbei werden in kleinen, aber gleichen Zeitintervallen (15 – 30 Minuten) der durchschnittliche QC und der entsprechende IC ermittelt und aufgezeichnet, wonach die durch die Verzögerung oder Geschwindigkeit gewonnenen Daten beiseite gelegt werden. Bei instabilem Wind gibt der Steuermann nicht den Kurs vor, sondern stellt die Aufgabe, das Segel auf der Suche nach dem Wind zu führen und dabei möglichst nah am allgemeinen Kurs zu bleiben. In einer solchen Situation kann es je nach den örtlichen Gegebenheiten und der Wettervorhersage manchmal von Vorteil sein, vom allgemeinen Kurs abzuweichen, um früher einen vollständigen, gleichmäßigen Wind zu bekommen (z. B. eine Brise vor der Küste). In all diesen Fällen werden im Interesse der Koppelnavigation alle Wendungen auf der Yacht und bei jeder Wende (zu Beginn und am Ende der Wende ist dies obligatorisch) mit einer bestimmten Häufigkeit (1-2 Mal pro Stunde, je nachdem) aufgezeichnet über Bedingungen), Daten über die Bewegung des Schiffes (Zeit, Kurs, Geschwindigkeit, Verzögerungsanzeige). Diese Aufzeichnungen werden verarbeitet, indem der Kurs und die Geschwindigkeit jeder Wende gemittelt und dann auf der Karte aufgezeichnet werden.
Beim Wenden kann es vorkommen, dass der Steuermann auf Anweisung des Kapitäns der Yacht beim Aussteigen in den Wind nicht auf den Kompass achtet. Hierbei werden in kleinen, aber gleichen Zeitintervallen (15 – 30 Minuten) der durchschnittliche QC und der entsprechende IC ermittelt und aufgezeichnet, wonach die durch die Verzögerung oder Geschwindigkeit gewonnenen Daten beiseite gelegt werden. Bei instabilem Wind gibt der Steuermann nicht den Kurs vor, sondern stellt die Aufgabe, das Segel auf der Suche nach dem Wind zu führen und dabei möglichst nah am allgemeinen Kurs zu bleiben. In einer solchen Situation kann es je nach den örtlichen Gegebenheiten und der Wettervorhersage manchmal von Vorteil sein, vom allgemeinen Kurs abzuweichen, um früher einen vollständigen, gleichmäßigen Wind zu bekommen (z. B. eine Brise vor der Küste). In all diesen Fällen werden im Interesse der Koppelnavigation alle Wendungen auf der Yacht und bei jeder Wende (zu Beginn und am Ende der Wende ist dies obligatorisch) mit einer bestimmten Häufigkeit (1-2 Mal pro Stunde, je nachdem) aufgezeichnet über Bedingungen), Daten über die Bewegung des Schiffes (Zeit, Kurs, Geschwindigkeit, Verzögerungsanzeige). Diese Aufzeichnungen werden verarbeitet, indem der Kurs und die Geschwindigkeit jeder Wende gemittelt und dann auf der Karte aufgezeichnet werden.
 Die Praxis zeigt, dass die Genauigkeit der Berechnung unter solchen Bedingungen mit zunehmender Diskretion der Beobachtungen zunimmt. Approximationsfehler gekrümmter Navigationsabschnitte durch gerade Linien sind im Vergleich zu anderen Fehlern unbedeutend.
Die Praxis zeigt, dass die Genauigkeit der Berechnung unter solchen Bedingungen mit zunehmender Diskretion der Beobachtungen zunimmt. Approximationsfehler gekrümmter Navigationsabschnitte durch gerade Linien sind im Vergleich zu anderen Fehlern unbedeutend.
 Schiffsdrift. Unter Drift („a“) versteht man in der Navigation das Abdriften eines Schiffes von der Kurslinie unter der kombinierten Wirkung des Windes und der durch ihn verursachten Wellen. Beim Driften bewegt sich das Schiff relativ zum Wasser unter der kombinierten Wirkung der Schiffsmaschinerie und des Windes. Die Linie seiner tatsächlichen Bewegung (OV), die als Kurslinie des Schiffes während der Drift bezeichnet wird, stimmt nicht mit dem Kurs des Schiffes (OA) überein. (Siehe Abbildung 33). Bei einer Verschiebung der Spurlinie nach rechts vom Schiffs-DP (der Wind weht nach Backbord) wird a ein Pluszeichen (+) zugewiesen, bei einer Verschiebung der Spur nach links (der Wind weht nach Steuerbord). Seite) wird ein Minuszeichen (-) zugewiesen. Zusammenhang zwischen Spurwinkel und Drift (PUa), IC und a: PUa = IC + a ; IR \u003d PUa - a; a = PUa – IR
Schiffsdrift. Unter Drift („a“) versteht man in der Navigation das Abdriften eines Schiffes von der Kurslinie unter der kombinierten Wirkung des Windes und der durch ihn verursachten Wellen. Beim Driften bewegt sich das Schiff relativ zum Wasser unter der kombinierten Wirkung der Schiffsmaschinerie und des Windes. Die Linie seiner tatsächlichen Bewegung (OV), die als Kurslinie des Schiffes während der Drift bezeichnet wird, stimmt nicht mit dem Kurs des Schiffes (OA) überein. (Siehe Abbildung 33). Bei einer Verschiebung der Spurlinie nach rechts vom Schiffs-DP (der Wind weht nach Backbord) wird a ein Pluszeichen (+) zugewiesen, bei einer Verschiebung der Spur nach links (der Wind weht nach Steuerbord). Seite) wird ein Minuszeichen (-) zugewiesen. Zusammenhang zwischen Spurwinkel und Drift (PUa), IC und a: PUa = IC + a ; IR \u003d PUa - a; a = PUa – IR

 Der Driftwinkel kann bestimmt werden, indem der tatsächliche Weg des Schiffes aus den Beobachtungen mit dem IR verglichen wird. Beim Verfolgen in Sichtweite der Küste werden eine Reihe zuverlässiger Navigationsbeobachtungen gemacht. Durch die Verbindung der beobachteten Punkte erhalten wir die Linie der tatsächlichen Bewegung des Schiffes, d. h. die Spurlinie während der Drift des Werfers (Abb. 34). Der Winkel zwischen der Spurlinie und der auf der Karte eingezeichneten IR-Linie entspricht dem Driftwinkel. Der gefundene Driftwinkel wird mit seinem Vorzeichen bei der weiteren Berechnung berücksichtigt. Wenn im Navigationsbereich eine Strömung herrscht, ist der resultierende Driftwinkel das Ergebnis der Einwirkung nicht nur des Windes, sondern auch der Strömung auf das Schiff.
Der Driftwinkel kann bestimmt werden, indem der tatsächliche Weg des Schiffes aus den Beobachtungen mit dem IR verglichen wird. Beim Verfolgen in Sichtweite der Küste werden eine Reihe zuverlässiger Navigationsbeobachtungen gemacht. Durch die Verbindung der beobachteten Punkte erhalten wir die Linie der tatsächlichen Bewegung des Schiffes, d. h. die Spurlinie während der Drift des Werfers (Abb. 34). Der Winkel zwischen der Spurlinie und der auf der Karte eingezeichneten IR-Linie entspricht dem Driftwinkel. Der gefundene Driftwinkel wird mit seinem Vorzeichen bei der weiteren Berechnung berücksichtigt. Wenn im Navigationsbereich eine Strömung herrscht, ist der resultierende Driftwinkel das Ergebnis der Einwirkung nicht nur des Windes, sondern auch der Strömung auf das Schiff.
 Berücksichtigung von Kalkulationsabweichungen. Wenn das Schiff driftet, wird während der Verlegung die Linie der Schiffsspur während der Drift auf der Karte eingezeichnet. Es ist mit KK beschriftet, mit seinem Vorzeichen ist die Kompasskorrektur und der Driftwinkel a berücksichtigt. Entlang der Weglinie werden die entlang der Verzögerung zurückgelegten Distanzen Sl abgelegt. Es wird angenommen, dass für a
Berücksichtigung von Kalkulationsabweichungen. Wenn das Schiff driftet, wird während der Verlegung die Linie der Schiffsspur während der Drift auf der Karte eingezeichnet. Es ist mit KK beschriftet, mit seinem Vorzeichen ist die Kompasskorrektur und der Driftwinkel a berücksichtigt. Entlang der Weglinie werden die entlang der Verzögerung zurückgelegten Distanzen Sl abgelegt. Es wird angenommen, dass für a
 Wenn der Navigator sich der Genauigkeit des Driftwinkels nicht sicher ist, wird zur Kontrolle der Navigationssicherheit zusätzlich zur Driftspur empfohlen, die IR-Linie auf der Karte einzuzeichnen. Beide Linien müssen frei von Unterwasserhindernissen sein. Die Berechnung erfolgt nur entlang der Gleislinie, entlang der sich das Schiff bewegt.
Wenn der Navigator sich der Genauigkeit des Driftwinkels nicht sicher ist, wird zur Kontrolle der Navigationssicherheit zusätzlich zur Driftspur empfohlen, die IR-Linie auf der Karte einzuzeichnen. Beide Linien müssen frei von Unterwasserhindernissen sein. Die Berechnung erfolgt nur entlang der Gleislinie, entlang der sich das Schiff bewegt.
 MEERSTRÖMUNGEN. Meeresströmungen sind die horizontalen Bewegungen großer Wassermassen. Die Strömung wird durch ihre Elemente charakterisiert: Richtung und Geschwindigkeit. Die Richtung der Strömung Kt wird in Grad in Kreisen oder Rhumbs angegeben und richtet sich nach dem Punkt am Horizont, auf den die Strömung gerichtet ist. Die aktuelle Geschwindigkeit Vt wird in Knoten gemessen und ihre kleinen Geschwindigkeiten werden in Meilen pro Tag gemessen. Je nach Art des Flusses werden sie in Konstanten eingeteilt, deren Elemente sich von Jahr zu Jahr fast nicht ändern, in periodische, deren Elemente sich nach einem bestimmten Gesetz ändern, und in temporäre (zufällige), deren Elemente kann sich dramatisch ändern. In der Praxis muss sich der Navigator am häufigsten mit konstanten und periodischen (Gezeiten-)Strömungen auseinandersetzen. Informationen über die Elemente von Konstant- und Gezeitenströmungen werden in Segelanweisungen, Strömungsatlanten und auf Karten platziert. Gleichzeitig werden die Durchschnittswerte der Strömungselemente angegeben, die erheblich von den tatsächlichen abweichen können. Die Bewegung des Schiffes relativ zum Boden beim Schwimmen in der Strömung wird durch folgende Faktoren bestimmt (Abb. 36).
MEERSTRÖMUNGEN. Meeresströmungen sind die horizontalen Bewegungen großer Wassermassen. Die Strömung wird durch ihre Elemente charakterisiert: Richtung und Geschwindigkeit. Die Richtung der Strömung Kt wird in Grad in Kreisen oder Rhumbs angegeben und richtet sich nach dem Punkt am Horizont, auf den die Strömung gerichtet ist. Die aktuelle Geschwindigkeit Vt wird in Knoten gemessen und ihre kleinen Geschwindigkeiten werden in Meilen pro Tag gemessen. Je nach Art des Flusses werden sie in Konstanten eingeteilt, deren Elemente sich von Jahr zu Jahr fast nicht ändern, in periodische, deren Elemente sich nach einem bestimmten Gesetz ändern, und in temporäre (zufällige), deren Elemente kann sich dramatisch ändern. In der Praxis muss sich der Navigator am häufigsten mit konstanten und periodischen (Gezeiten-)Strömungen auseinandersetzen. Informationen über die Elemente von Konstant- und Gezeitenströmungen werden in Segelanweisungen, Strömungsatlanten und auf Karten platziert. Gleichzeitig werden die Durchschnittswerte der Strömungselemente angegeben, die erheblich von den tatsächlichen abweichen können. Die Bewegung des Schiffes relativ zum Boden beim Schwimmen in der Strömung wird durch folgende Faktoren bestimmt (Abb. 36).

 Unter der Wirkung von Schiffsmotoren bewegt sich das Schiff relativ zum Wasser in Richtung seines DP, also der Linie des wahren Kurses OA. Die Geschwindigkeit des Schiffes im Verhältnis zum Wasser ist die im Logbuch angegebene Geschwindigkeit Vl. Gleichzeitig wird das Schiff zusammen mit der gesamten Wassermasse relativ zum Boden in Strömungsrichtung des OD mit der Strömungsgeschwindigkeit Vt mitgerissen. Infolgedessen bewegt sich das Schiff relativ zum Boden entlang des resultierenden OB mit einer Geschwindigkeit, die als wahre Schiffsgeschwindigkeit V bezeichnet wird. In diesem Fall bleibt der DP des Schiffs parallel zur IR-Linie. Die Linie OB, entlang der sich das Schiff unter der kombinierten Wirkung der Schiffsmaschinerie und der Strömung bewegt, wird als Linie der Schiffsspur auf der Strömung bezeichnet. Die Position der Spurlinie relativ zum wahren Meridian wird durch den Winkel NOB bestimmt, der als Spurwinkel auf dem PU-Strom bezeichnet wird. Der Winkel zwischen dem wahren Kurs des Schiffes (OA) und dem Kurs (OB) wird als Driftwinkel bezeichnet. Wenn das Schiff nach rechts von seinem DP driftet (die Strömung ist zur Backbordseite gerichtet), wird ein „+“-Zeichen zugewiesen, und wenn es nach links driftet, wird ein „-“-Zeichen zugewiesen. Beziehung zwischen (PU), IR und:
Unter der Wirkung von Schiffsmotoren bewegt sich das Schiff relativ zum Wasser in Richtung seines DP, also der Linie des wahren Kurses OA. Die Geschwindigkeit des Schiffes im Verhältnis zum Wasser ist die im Logbuch angegebene Geschwindigkeit Vl. Gleichzeitig wird das Schiff zusammen mit der gesamten Wassermasse relativ zum Boden in Strömungsrichtung des OD mit der Strömungsgeschwindigkeit Vt mitgerissen. Infolgedessen bewegt sich das Schiff relativ zum Boden entlang des resultierenden OB mit einer Geschwindigkeit, die als wahre Schiffsgeschwindigkeit V bezeichnet wird. In diesem Fall bleibt der DP des Schiffs parallel zur IR-Linie. Die Linie OB, entlang der sich das Schiff unter der kombinierten Wirkung der Schiffsmaschinerie und der Strömung bewegt, wird als Linie der Schiffsspur auf der Strömung bezeichnet. Die Position der Spurlinie relativ zum wahren Meridian wird durch den Winkel NOB bestimmt, der als Spurwinkel auf dem PU-Strom bezeichnet wird. Der Winkel zwischen dem wahren Kurs des Schiffes (OA) und dem Kurs (OB) wird als Driftwinkel bezeichnet. Wenn das Schiff nach rechts von seinem DP driftet (die Strömung ist zur Backbordseite gerichtet), wird ein „+“-Zeichen zugewiesen, und wenn es nach links driftet, wird ein „-“-Zeichen zugewiesen. Beziehung zwischen (PU), IR und:
 PU = IR +; IR \u003d PU -; = PU - IR
PU = IR +; IR \u003d PU -; = PU - IR
 ZAHL, WENN SIE AUF DEM STROM SCHWEBEN. Beim Fahren in konstanter Strömung wird auf der Karte die Bahnlinie des Schiffes eingezeichnet, entlang der es sich tatsächlich relativ zum Boden bewegt. Oberhalb der Spurlinie tragen sie mit einem eigenen Zeichen KK, die Kompasskorrektur und den Driftwinkel ein. Für Hilfsberechnungen wird zusätzlich eine IR-Linie mit einer dünnen Linie angelegt, entlang derer die vom Schiff zurückgelegten Distanzen Sl relativ zum Wasser entsprechend den Lag-Messwerten aufgetragen werden. Die auf der IC-Linie erhaltenen Punkte werden in Stromrichtung auf die Gleislinie übertragen (Abb. 37). Zählbare Punkte auf der Streckenlinie sind mit Zeit- und Verzögerungswerten markiert, und an den entsprechenden Punkten auf der Kurslinie gibt es nur Verzögerungswerte. Auf die Pfadlinie werden Verfahr-, Öffnungs- und Ausblendpunkte von Orientierungspunkten angewendet (Abb. 38).
ZAHL, WENN SIE AUF DEM STROM SCHWEBEN. Beim Fahren in konstanter Strömung wird auf der Karte die Bahnlinie des Schiffes eingezeichnet, entlang der es sich tatsächlich relativ zum Boden bewegt. Oberhalb der Spurlinie tragen sie mit einem eigenen Zeichen KK, die Kompasskorrektur und den Driftwinkel ein. Für Hilfsberechnungen wird zusätzlich eine IR-Linie mit einer dünnen Linie angelegt, entlang derer die vom Schiff zurückgelegten Distanzen Sl relativ zum Wasser entsprechend den Lag-Messwerten aufgetragen werden. Die auf der IC-Linie erhaltenen Punkte werden in Stromrichtung auf die Gleislinie übertragen (Abb. 37). Zählbare Punkte auf der Streckenlinie sind mit Zeit- und Verzögerungswerten markiert, und an den entsprechenden Punkten auf der Kurslinie gibt es nur Verzögerungswerte. Auf die Pfadlinie werden Verfahr-, Öffnungs- und Ausblendpunkte von Orientierungspunkten angewendet (Abb. 38).

 BERECHNUNG MIT GEMEINSAMER BUCHHALTUNG FÜR DRIFT UND CURRENT. Betrachten wir den Fall, dass sich das Schiff unter der kombinierten Wirkung von Schiffsmotoren, Wind und Strömung relativ zum Boden bewegt. Um die Berechnung auf der Karte aufrechtzuerhalten, legen Sie die Linie des Schiffsweges bei Drift und Strömung fest und tragen Sie KK, die Kompasskorrektur und den Gesamtdriftwinkel c = a + ein.
BERECHNUNG MIT GEMEINSAMER BUCHHALTUNG FÜR DRIFT UND CURRENT. Betrachten wir den Fall, dass sich das Schiff unter der kombinierten Wirkung von Schiffsmotoren, Wind und Strömung relativ zum Boden bewegt. Um die Berechnung auf der Karte aufrechtzuerhalten, legen Sie die Linie des Schiffsweges bei Drift und Strömung fest und tragen Sie KK, die Kompasskorrektur und den Gesamtdriftwinkel c = a + ein.
 Darüber hinaus wird für Hilfsberechnungen auch eine Driftspur auf der Karte angelegt, entlang derer die Navigation des Schiffes entlang des Sl-Logs verschoben wird. Jeder Punkt auf der Driftspur entspricht einem Punkt auf der Linie der tatsächlichen Schiffsbewegung. Diese Punkte sind durch den Flussvektor miteinander verbunden. Grafisch gesehen handelte es sich um Aufgaben, die sich auf das Finden der Spurlinie auf der Karte während Drift und Strömung, die wahre Geschwindigkeit V und den gesamten Driftwinkel c für die gegebenen KK-, Vl-, a- und Strömungselemente, das Einzeichnen eines zählbaren Ortes, das Vorberechnen von Zeit usw. bezogen B. zum Zeitpunkt der Ankunft an einem bestimmten Punkt, wird die Suche nach einer Überquerung des Referenzpunkts auf die gleiche Weise wie beim Schwimmen in der Strömung gelöst, jedoch werden während der Drift alle Hilfskonstruktionen auf der Gleislinie vorgenommen und ersetzen die IR-Linie.
Darüber hinaus wird für Hilfsberechnungen auch eine Driftspur auf der Karte angelegt, entlang derer die Navigation des Schiffes entlang des Sl-Logs verschoben wird. Jeder Punkt auf der Driftspur entspricht einem Punkt auf der Linie der tatsächlichen Schiffsbewegung. Diese Punkte sind durch den Flussvektor miteinander verbunden. Grafisch gesehen handelte es sich um Aufgaben, die sich auf das Finden der Spurlinie auf der Karte während Drift und Strömung, die wahre Geschwindigkeit V und den gesamten Driftwinkel c für die gegebenen KK-, Vl-, a- und Strömungselemente, das Einzeichnen eines zählbaren Ortes, das Vorberechnen von Zeit usw. bezogen B. zum Zeitpunkt der Ankunft an einem bestimmten Punkt, wird die Suche nach einer Überquerung des Referenzpunkts auf die gleiche Weise wie beim Schwimmen in der Strömung gelöst, jedoch werden während der Drift alle Hilfskonstruktionen auf der Gleislinie vorgenommen und ersetzen die IR-Linie.
 SCHÄTZUNGEN DER GENAUIGKEIT DER ZAHL. Durch die Auswirkung unberücksichtigter Fehler stimmen der tatsächliche Weg des Schiffes und die von ihm zurückgelegte Strecke (Reise) nicht mit denen überein, die bei der Berechnung auf der Karte berücksichtigt wurden, und die tatsächliche Position des Schiffes stimmt nicht überein das berechnete. Für eine ungefähre Beurteilung der Fehler in der Berechnung können Sie die folgenden Daten verwenden, die die gesammelten allgemeinen Navigationserfahrungen und die durchgeführten Studien widerspiegeln. Die Dauer der Navigation (Stunden) entspricht dem radialen quadratischen Mittelfehler, % von S: Bis zu 3 Stunden – 10 %; 3–6 Stunden – 9 %; 6–10 Stunden – 8 %; 10 - 14 Stunden - 7 %; 14–18 Stunden – 6 %; 18–23 Stunden – 5 %; 23-25 Stunden - 4%; mehr als 35 Stunden - 3 %. Bei der Festlegung der Schiffsroute auf der Karte in einem bestimmten Abstand zu Navigationshindernissen muss die Möglichkeit einer Abweichung des Schiffes von der Routenlinie berücksichtigt werden, und der Abweichungswert nimmt mit zunehmender zurückgelegter Distanz zu, insbesondere beim Fahren mit Drift und aktuell. Die unzureichende Genauigkeit der Berechnung erfordert eine zusätzliche Kontrolle der Position des Schiffes, d. h. die Bestimmung seines Standorts nicht nur durch Berechnung, sondern auch durch Beobachtungen: navigatorisch, astronomisch oder mithilfe von GPS.
SCHÄTZUNGEN DER GENAUIGKEIT DER ZAHL. Durch die Auswirkung unberücksichtigter Fehler stimmen der tatsächliche Weg des Schiffes und die von ihm zurückgelegte Strecke (Reise) nicht mit denen überein, die bei der Berechnung auf der Karte berücksichtigt wurden, und die tatsächliche Position des Schiffes stimmt nicht überein das berechnete. Für eine ungefähre Beurteilung der Fehler in der Berechnung können Sie die folgenden Daten verwenden, die die gesammelten allgemeinen Navigationserfahrungen und die durchgeführten Studien widerspiegeln. Die Dauer der Navigation (Stunden) entspricht dem radialen quadratischen Mittelfehler, % von S: Bis zu 3 Stunden – 10 %; 3–6 Stunden – 9 %; 6–10 Stunden – 8 %; 10 - 14 Stunden - 7 %; 14–18 Stunden – 6 %; 18–23 Stunden – 5 %; 23-25 Stunden - 4%; mehr als 35 Stunden - 3 %. Bei der Festlegung der Schiffsroute auf der Karte in einem bestimmten Abstand zu Navigationshindernissen muss die Möglichkeit einer Abweichung des Schiffes von der Routenlinie berücksichtigt werden, und der Abweichungswert nimmt mit zunehmender zurückgelegter Distanz zu, insbesondere beim Fahren mit Drift und aktuell. Die unzureichende Genauigkeit der Berechnung erfordert eine zusätzliche Kontrolle der Position des Schiffes, d. h. die Bestimmung seines Standorts nicht nur durch Berechnung, sondern auch durch Beobachtungen: navigatorisch, astronomisch oder mithilfe von GPS.