เพิ่มการเคลื่อนไหวแบบหมุนของวัตถุแข็งเกร็ง การเพิ่มการหมุนรอบแกนขนาน การเพิ่มความเร็วเชิงมุมของวัตถุแข็งเกร็ง
มีสามกรณีที่ต้องพิจารณา
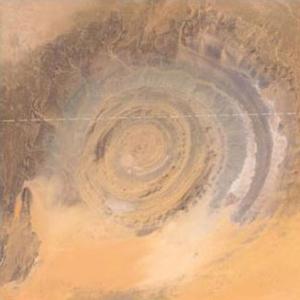
1) การหมุนมีทิศทางเดียวกันร่างกายมีส่วนร่วมในการหมุนสองครั้ง: เคลื่อนที่ได้ด้วยความเร็วเชิงมุมและสัมพันธ์กับความเร็วเชิงมุม (รูปที่ 71) ร่างกายดังกล่าวเป็นดิสก์ที่แสดงในรูปที่ 72. ลองตัดแกนการหมุนที่ตั้งฉากกับเส้นตรงกัน เราได้รับจุดตัดกันและเป็นเวกเตอร์ความเร็วเชิงมุมและสามารถถ่ายโอนได้ ในส่วนของร่างกายในขณะพิจารณาจะมีจุดหนึ่งที่มีความเร็วเป็นศูนย์ ตามทฤษฎีบทการบวกความเร็วของจุดที่เรามี
จุดของร่างกายซึ่งมีการถ่ายโอนและความเร็วสัมพัทธ์ขนานกันและตรงกันข้ามสามารถอยู่ในส่วนที่อยู่ระหว่างจุด และ เท่านั้น ความเร็วของจุดจะเป็นศูนย์ถ้า แต่ , เพราะฉะนั้น,
เส้นตรงที่ตั้งฉากกับแกนหมุนสามารถวาดได้ทุกระยะ ดังนั้นจึงมีแกนติดอยู่กับลำตัวและขนานกับแกนการหมุนซึ่งมีความเร็วของจุดซึ่งเท่ากับศูนย์ ณ เวลาที่กำหนด เธอคือ แกนหมุนทันทีอยู่ระหว่างการพิจารณาในขณะนั้น
ในการกำหนดความเร็วเชิงมุมของการหมุนของร่างกายรอบแกนชั่วขณะเราจะคำนวณความเร็วของจุดโดยพิจารณาถึงความซับซ้อนในการเคลื่อนที่ของจุดนั้น เราได้รับ:
เพราะฉะนั้น,
สำหรับความเร็วของจุดที่ร่างกายหมุนรอบแกนชั่วขณะเรามี
เรามีการเทียบความเร็วจุดที่ได้รับในสองวิธี
ตาม (138)
สูตร (138) สามารถแสดงเป็น:
เราได้รับสัดส่วนอนุพันธ์และใช้สูตร (139)
ดังนั้น, เมื่อเพิ่มการหมุนรอบตัวสองครั้ง แกนขนานในทิศทางเดียวกัน การหมุนรอบแกนขนานในทิศทางเดียวกันจะได้มาด้วยความเร็วเชิงมุมเท่ากับผลรวมของความเร็วเชิงมุมของการหมุนส่วนประกอบ แกนทันทีของการหมุนที่เกิดขึ้นจะแบ่งส่วนระหว่างแกนของการหมุนส่วนประกอบออกเป็นส่วนต่างๆ แปรผกผันกับความเร็วเชิงมุมของการหมุนภายใน- จุดที่มีการหารนี้จะอยู่ระหว่างจุดและ
ตรงกันข้ามเป็นจริง การหมุนรอบแกนด้วยความเร็วเชิงมุมสามารถแบ่งออกเป็น 2 รอบรอบแกนขนาน 2 แกนด้วยความเร็วเชิงมุม และ
วัตถุที่หมุนรอบแกนขนานกันสองครั้งจะทำการเคลื่อนที่ของระนาบ การเคลื่อนที่ของระนาบของวัตถุแข็งเกร็งสามารถแสดงเป็นการหมุนสองรอบ แบบเคลื่อนที่ได้และแบบสัมพันธ์ รอบแกนขนานกัน การเคลื่อนที่ระนาบของล้อดาวเทียม 2 บนล้อคงที่ 1 (รูปที่ 73) เป็นตัวอย่างของการเคลื่อนที่ที่สามารถแทนที่ได้ด้วยการหมุนสองครั้งรอบแกนขนานในทิศทางเดียวกัน เช่น ทวนเข็มนาฬิกา วงล้อดาวเทียมทำการหมุนแบบแปลร่วมกับข้อเหวี่ยงรอบแกนที่ผ่านจุดที่มีความเร็วเชิงมุม และการหมุนสัมพัทธ์รอบแกนที่ผ่านจุดที่มีความเร็วเชิงมุม การหมุนทั้งสองมีทิศทางเดียวกัน การหมุนสัมบูรณ์เกิดขึ้นรอบๆ แกนที่ผ่านจุด ซึ่งปัจจุบันคือ MCS มันจะอยู่ที่จุดที่ล้อสัมผัสกันหากล้อที่กำลังเคลื่อนที่หมุนโดยไม่เลื่อนไปที่ล้อที่อยู่กับที่ ความเร็วเชิงมุมของการหมุนสัมบูรณ์
การหมุนสัมบูรณ์ที่ความเร็วเชิงมุมนี้เกิดขึ้นในทิศทางเดียวกับส่วนประกอบของการเคลื่อนที่
2) การหมุนมีทิศทางตรงกันข้าม ลองพิจารณากรณีนี้เมื่อ (รูปที่ 74) เราได้รับสูตรต่อไปนี้:
เพื่อให้ได้สูตรเหล่านี้ เราจะแยกการหมุนด้วยความเร็วเชิงมุมออกเป็น 2 รอบในทิศทางเดียวกันรอบแกนขนาน 2 แกนที่มีความเร็วเชิงมุม และ ให้เรานำแกนของการหมุนอันใดอันหนึ่งด้วยความเร็วเชิงมุมเพื่อผ่านจุดนั้นแล้วเลือก . การหมุนอีกครั้งด้วยความเร็วเชิงมุมจะผ่านจุดนั้น (รูปที่ 75) จาก (139) และ (140) ที่เรามี
ความถูกต้องของสูตร (141) และ (142) ได้รับการพิสูจน์แล้ว ดังนั้น, เมื่อเพิ่มการหมุนของวัตถุแข็งเกร็ง 2 รอบรอบแกนขนานในทิศทางตรงกันข้าม ผลที่ได้คือ การหมุนรอบแกนขนานด้วยความเร็วเชิงมุมเท่ากับผลต่างของความเร็วเชิงมุมของส่วนประกอบที่หมุนในทิศทางการหมุนด้วยความเร็วเชิงมุมที่สูงขึ้น . แกนของการหมุนแบบสัมบูรณ์จะแบ่งส่วนระหว่างแกนของการหมุนส่วนประกอบออกเป็นส่วนต่างๆ ที่เป็นสัดส่วนผกผันกับความเร็วเชิงมุมของการหมุนเหล่านี้ภายในจุดที่มีการหารนี้จะอยู่ที่ส่วนด้านหลังจุดที่แกนการหมุนผ่านไปด้วยความเร็วเชิงมุมที่สูงกว่า
คุณยังสามารถแบ่งการหมุนหนึ่งรอบออกเป็นสองรอบแกนขนานที่มีทิศทางการหมุนตรงกันข้าม ตัวอย่างการเคลื่อนที่ของเครื่องบินของวัตถุแข็งเกร็ง ซึ่งสามารถแสดงได้ด้วยการหมุนสองครั้งรอบแกนขนานในทิศทางตรงกันข้าม คือการเคลื่อนที่ของล้อดาวเทียมที่กลิ้งอยู่ภายในล้อที่อยู่นิ่งโดยไม่เลื่อน (รูปที่ 76) ในกรณีนี้ สิ่งที่พกพาได้คือการหมุนของล้อ 2 พร้อมกับข้อเหวี่ยงด้วยความเร็วเชิงมุมรอบแกนที่ผ่านจุดที่ การหมุนสัมพัทธ์ของล้อ 2 จะอยู่ที่ประมาณแกนที่ผ่านจุดด้วยความเร็วเชิงมุม และการหมุนสัมบูรณ์ของล้อนี้รอบแกนที่ผ่าน MCS จุด ด้วยความเร็วเชิงมุม ในกรณีนี้ ความเร็วเชิงมุมของการหมุนสัมบูรณ์คือ การหมุนในทิศทางนี้เกิดขึ้นพร้อมกับทิศทางการหมุนซึ่งมีความเร็วเชิงมุมสูง แกนของการหมุนแบบสัมบูรณ์จะอยู่นอกส่วนที่อยู่ด้านหลังแกนของการหมุนด้วยความเร็วเชิงมุมที่สูงกว่า
3) การหมุนสองสามครั้ง หมุนสองสามรอบคือการรวมกันของการหมุนสองครั้งของวัตถุแข็งเกร็ง ทั้งแบบเคลื่อนที่ได้และแบบสัมพัทธ์ รอบแกนขนานที่มีความเร็วเชิงมุมเท่ากันในทิศทางตรงกันข้าม (รูปที่ 77) ในกรณีนี้. พิจารณาการเคลื่อนที่ของวัตถุว่าซับซ้อนตามทฤษฎีบทบวกความเร็วของจุดที่เรามี
องค์ประกอบของการเคลื่อนที่ ได้แก่ การหมุนด้วยความเร็วเชิงมุม และ เราใช้สูตรของออยเลอร์สำหรับพวกมัน
หลังจากนี้เพื่อความเร็วสัมบูรณ์ที่เรามี
เพราะ . เมื่อพิจารณาว่าเราได้รับ
เพราะ ผลิตภัณฑ์เวกเตอร์เรียกได้ว่าเป็นโมเมนต์ความเร็วเชิงมุมสัมพันธ์กับจุดนั้นเลย
มันเท่ากับโมเมนตัมเวกเตอร์ของการหมุนคู่หนึ่ง ซึ่งสามารถแสดงเป็นโมเมนตัมเวกเตอร์ของความเร็วเชิงมุมอันใดอันหนึ่งสัมพันธ์กับจุดใดๆ ที่อยู่บนแกนการหมุนของวัตถุด้วยความเร็วเชิงมุมอื่นรวมอยู่ในคู่ของ การหมุน ความเร็วของการเคลื่อนที่เชิงแปลของร่างกายที่มีส่วนร่วมในการหมุนคู่หนึ่งนั้นขึ้นอยู่กับลักษณะของการหมุนคู่นั้นเท่านั้น ตั้งฉากกับแกนของการหมุนคู่หนึ่ง ค่าตัวเลขของมันสามารถแสดงเป็น
โดยที่ระยะทางที่สั้นที่สุดระหว่างแกนของคู่หรือไหล่ของคู่
การหมุนคู่หนึ่งจะคล้ายคลึงกับแรงคู่หนึ่งที่กระทำต่อวัตถุแข็งเกร็ง ความเร็วเชิงมุมของการหมุนของวัตถุซึ่งคล้ายกับแรงคือเวกเตอร์แบบเลื่อน โมเมนต์เวกเตอร์ของแรงสองสามแรงเป็นเวกเตอร์อิสระ โมเมนตัมเวกเตอร์ของการหมุนคู่หนึ่งมีคุณสมบัติคล้ายกัน
หากคุณยึดส่วนตรงเข้ากับเกียร์ 2 มันจะยังคงขนานกับตำแหน่งเดิมเมื่อกลไกเคลื่อนที่ หากส่วนแนวนอนนี้รวมกับก้นถ้วยน้ำ โดยติดถ้วยเข้ากับอุปกรณ์ที่เคลื่อนที่ได้ น้ำจะไม่หกออกจากถ้วยเมื่อกลไกเคลื่อนที่ในระนาบแนวตั้ง
ในระหว่างการเคลื่อนที่แบบแปลน วิถีของทุกจุดของร่างกายจะเหมือนกัน จุดนี้จะอธิบายวงกลมรัศมี วิถีการเคลื่อนที่ของจุดอื่นๆ ทั้งหมดของเฟืองที่กำลังเคลื่อนที่จะเป็นวงกลมที่มีรัศมีเท่ากันเช่นกัน วัตถุที่มีส่วนร่วมในการหมุนคู่จะทำการเคลื่อนที่แบบแปลนระนาบ
ถ้าการเคลื่อนที่สัมพัทธ์และการเคลื่อนที่เชิงแปลของวัตถุหมุนรอบแกนขนาน (รูปที่ 133) การกระจายตัวของความเร็วสัมบูรณ์ในตัววัตถุในช่วงเวลาใดก็ตามจะเหมือนกับระหว่างการเคลื่อนที่แบบหมุนรอบแกนชั่วขณะซึ่งขนานกับ แกนของการหมุนส่วนประกอบและแบ่งระยะห่างระหว่างพวกมันภายใน ( หากทิศทางของการหมุนแบบพกพาและการหมุนสัมพัทธ์ตรงกัน) หรือภายนอก (หากทิศทางของการหมุนเหล่านี้ถอยหลัง) ออกเป็นส่วน ๆ แปรผกผันกับความเร็วเชิงมุมสัมพัทธ์และแบบพกพาเช่น
โดยที่ความเร็วเชิงมุมแบบพกพา ความเร็วเชิงสัมพัทธ์ และสัมบูรณ์ ตามลำดับ

หากทิศทางของความเร็วเชิงมุมตรงกัน (รูปที่ 133, a) ความเร็วเชิงมุมสัมบูรณ์จะถูกกำกับไปในทิศทางเดียวกันและในโมดูลัสจะเท่ากับผลรวมของโมดูลัส:
![]()
ถ้าเวกเตอร์พุ่งเข้ามา ฝั่งตรงข้าม(รูปที่ 133, b) จากนั้นความเร็วเชิงมุมสัมบูรณ์จะถูกมุ่งตรงไปยังส่วนที่ใหญ่กว่าและในโมดูลัสจะเท่ากับความแตกต่างในโมดูลัสของพวกมันนั่นคือ
![]()
![]()
หากความเร็วเชิงมุมสัมพัทธ์และแบบพกพาก่อตัวเป็นความเร็วเชิงมุมคู่หนึ่งนั่นคือ (รูปที่ 133, c) การกระจายตัวของความเร็วสัมบูรณ์ในร่างกายจะเหมือนกับระหว่างการเคลื่อนที่แบบแปลและความเร็วสัมบูรณ์ของจุดใด ๆ ของร่างกาย ณ ขณะหนึ่ง เท่ากับเวกเตอร์ - ช่วงเวลาของคู่รักที่ระบุ:
เมื่อแก้ไขปัญหาที่เกี่ยวข้องกับการเพิ่มการหมุนรอบแกนขนานเรามักจะไม่ทำงานด้วยค่าสัมบูรณ์ของความเร็วเชิงมุม แต่ด้วยปริมาณเชิงพีชคณิตซึ่งเป็นการฉายภาพความเร็วเชิงมุมบนแกนขนานกับแกนของการหมุนที่อยู่ระหว่างการพิจารณา . การเลือกทิศทางบวกของแกนที่ระบุนั้นขึ้นอยู่กับอำเภอใจ

ในกรณีนี้ ความเร็วเชิงมุมของทิศทางหนึ่งจะเป็นค่าบวก และความเร็วเชิงมุมของทิศทางตรงกันข้ามจะเป็นค่าลบ และความเร็วเชิงมุมสัมบูรณ์จะแสดงเป็นผลรวมพีชคณิตของส่วนประกอบของความเร็วเชิงมุม
ตัวอย่างที่ 94 ในกลไกดิฟเฟอเรนเชียล (รูปที่ 134, a และ b) การเชื่อมโยงการขับเคลื่อนคือล้อที่ 1 และพาหะ H ซึ่งถือแกนของดาวเทียมคู่ เมื่อทราบความเร็วเชิงมุมของล้อ 1 และตัวพา H รวมถึงจำนวนฟันของล้อทั้งหมด ให้ค้นหาความเร็วเชิงมุมของล้อ 3
สารละลาย. วิธีการ (วิธีวิลลิส) สาระสำคัญของวิธีนี้คือการลดปัญหาในการวิเคราะห์กลไกของดาวเคราะห์และกลไกดิฟเฟอเรนเชียลไปจนถึงการวิเคราะห์กลไกเกียร์ธรรมดาโดยการย้ายจากการเคลื่อนที่สัมบูรณ์ของการเชื่อมโยงของกลไกของดาวเคราะห์ที่พิจารณาถึงการเคลื่อนไหวสัมพัทธ์ของพวกมันด้วยความเคารพต่อพาหะ
ขอให้เรามีกลไกของดาวเคราะห์ที่มีแกนล้อขนานกัน ให้เราแสดงด้วยค่าพีชคณิตถึงความเร็วเชิงมุมสัมบูรณ์ของลิงก์และพาหะ H ตามลำดับ
ในการเปลี่ยนไปสู่การเคลื่อนที่สัมพันธ์กับพาหะ ให้เราสื่อสารทางจิตใจกับทั้งระบบถึงการหมุนรอบแกนของพาหะด้วยความเร็วเชิงมุม (เช่น เท่ากับความเร็วเชิงมุมของพาหะ แต่มุ่งไปในทิศทางตรงกันข้าม) จากนั้นพาหะจะหยุด และการเชื่อมโยงต่างๆ จะได้รับความเร็วเชิงมุมตามทฤษฎีบทการเพิ่มการหมุน เนื่องจากด้วยตัวพาที่อยู่กับที่เราได้รับกลไกเกียร์ธรรมดาการเชื่อมโยงที่หมุนรอบแกนที่อยู่กับที่จากนั้นจึงสามารถใช้สูตร (97) สำหรับอัตราทดเกียร์กับกลไกนี้ได้ซึ่งนำเราไปสู่สิ่งที่เรียกว่าสูตรวิลลิส:
![]()
โดยที่อัตราทดเกียร์ระหว่างลิงค์และการเคลื่อนที่สัมพันธ์กับพาหะ H (ตามที่ระบุโดยตัวยก) อัตราทดเกียร์ตามที่ระบุไว้แล้วสามารถแสดงผ่านการออกแบบและพารามิเตอร์ทางเรขาคณิตของกลไก (จำนวนฟันหรือรัศมีของวงกลมเริ่มต้นในตาข่ายของล้อ)
ในปัญหาของเรา เราใช้สูตรวิลลิสกับลิงก์ 1 และ 3:
![]()
(อัตราทดเกียร์ระหว่างล้อ 5 และ 2 เป็นบวก เนื่องจากล้อมีเกียร์ภายใน)
(ในที่นี้อัตราทดเกียร์เป็นลบ เนื่องจากล้อเป็น 2 และมีเกียร์ภายนอก)
ดังนั้น,
![]()
![]()
ตัวอย่างเช่น และนอกจากนี้ ให้ล้อและพาหะ H หมุนไปในทิศทางเดียวด้วยความเร็วเชิงมุม และ ในกรณีนี้. ถ้าล้อและส่วนรองรับ H หมุนไปในทิศทางตรงกันข้าม ความเร็วเชิงมุมของจุดเชื่อมต่อใดจุดหนึ่งจะต้องถือเป็นบวก และอีกจุดเป็นลบ
ในกรณีนี้ ที่มีค่าสัมบูรณ์เท่ากันของความเร็วเชิงมุมของลิงก์และ H เราจะได้:
กล่าวคือ ล้อที่ 3 จะหมุนไปในทิศทางเดียวกับคนขับ เนื่องจากสัญญาณของความเร็วเชิงมุมตรงกัน
ถ้าเราซ่อมวงล้อ เราก็จะได้กลไกดาวเคราะห์ง่ายๆ สูตรวิลลิสในกรณีนี้ยังคงใช้อยู่ คุณเพียงแค่ต้องใส่สูตรนี้ลงไป ซึ่งให้:
![]()
วิธีที่ 2 (วิธีศูนย์กลางความเร็วชั่วขณะ) เนื่องจากการเชื่อมโยงของกลไกดาวเคราะห์หรือกลไกดิฟเฟอเรนเชียลที่มีแกนขนานกันทำให้เกิดการเคลื่อนที่แบบระนาบ-ขนาน เมื่อวิเคราะห์กลไกดังกล่าว เราจึงสามารถประยุกต์ใช้ทฤษฎีการเคลื่อนที่แบบระนาบ-ขนาน และโดยเฉพาะอย่างยิ่ง ใช้วิธีการของศูนย์กลางความเร็วชั่วขณะ มีประโยชน์ในการแก้ปัญหาโดยการสร้างสามเหลี่ยมความเร็ว ซึ่งโดยปกติจะนำออกไปนอกกลไก (รูปที่ 134, c) เราแสดงรัศมีของล้อของกลไกที่พิจารณาโดย . แล้วเราก็มี
ในรูป ในรูป 54 แสดงวัตถุที่มีการเคลื่อนไหวที่ซับซ้อน - การหมุนรอบแกน ซึ่งตัวมันเองก็หมุนไปรอบแกนคงที่อีกแกนหนึ่ง โดยธรรมชาติแล้วการหมุนครั้งแรกควรเรียกว่าการเคลื่อนไหวสัมพัทธ์ของร่างกาย การหมุนครั้งที่สอง - แบบพกพาและควรกำหนดแกนที่เกี่ยวข้องและ .
รูปที่ 54
การเคลื่อนที่สัมบูรณ์จะเป็นการหมุนรอบจุดตัดของแกน เกี่ยวกับ- (ถ้าตัวใหญ่กว่าก็จุดตรงกันด้วย เกี่ยวกับจะยังคงนิ่งอยู่ตลอดเวลา) ความเร็วเชิงมุมของการหมุนแบบพกพาและการหมุนสัมพัทธ์นั้นแสดงโดยเวกเตอร์และพล็อตจากจุดคงที่ เกี่ยวกับจุดตัดของแกนตามแนวแกนที่สอดคล้องกัน
ลองหาความเร็วสัมบูรณ์ของจุดใดจุดหนึ่งกัน มร่างกายตำแหน่งที่กำหนดโดยเวกเตอร์รัศมี (รูปที่ 54)
ดังที่คุณทราบ มันประกอบด้วยความเร็วสองระดับ สัมพันธ์กัน และพกพาได้: . แต่การเคลื่อนที่สัมพัทธ์ของจุด (โดยใช้กฎการหยุด) ซึ่งเป็นการหมุนด้วยความเร็วเชิงมุมรอบแกน ถูกกำหนดโดยเวกเตอร์รัศมี นั่นเป็นเหตุผลว่าทำไม .
|
การเคลื่อนที่แบบพกพาของจุดในช่วงเวลาหนึ่งๆ อีกครั้งโดยใช้กฎการหยุด จะเป็นการหมุนเช่นกัน แต่รอบๆ แกนที่มีความเร็วเชิงมุม และจะถูกกำหนดโดยเวกเตอร์รัศมีเดียวกัน ดังนั้นความเร็วในการถ่ายโอนคือ
ความเร็วสัมบูรณ์ ความเร็วเมื่อหมุนรอบจุดคงที่ เกี่ยวกับในการเคลื่อนที่เป็นทรงกลม ถูกกำหนดในลักษณะเดียวกันกับ โดยที่ คือ ความเร็วเชิงมุมสัมบูรณ์ที่พุ่งไปตามแกนการหมุนชั่วขณะ ร.
การใช้สูตรเพิ่มความเร็วที่เราได้รับ: หรือ .
นั่นคือ ความเร็วเชิงมุมชั่วขณะ หรือความเร็วเชิงมุมของการเคลื่อนที่สัมบูรณ์ คือผลรวมเวกเตอร์ของความเร็วเชิงมุมของการเคลื่อนที่แบบพกพาและการเคลื่อนที่แบบสัมพัทธ์ และแกนหมุนชั่วขณะ ป, กำกับตามเวกเตอร์, เกิดขึ้นพร้อมกับเส้นทแยงมุมของสี่เหลี่ยมด้านขนานที่สร้างบนเวกเตอร์และ (รูปที่ 54)
กรณีพิเศษ:
1. แกนหมุนและขนานกันทิศทางการหมุนเหมือนกัน (รูปที่ 55)
รูปที่.55
เนื่องจากเวกเตอร์ขนานกันและมีทิศทางไปในทิศทางเดียวกัน ความเร็วเชิงมุมสัมบูรณ์จึงมีขนาดเท่ากับผลรวมของโมดูล และเวกเตอร์จึงมีทิศทางไปในทิศทางเดียวกัน แกนหมุนทันที รแบ่งระยะห่างระหว่างแกนออกเป็นส่วนต่างๆ ตามสัดส่วนผกผันกับ และ:
- (คล้ายกับผลลัพธ์ กองกำลังคู่ขนาน).
ในกรณีนี้ร่างกายโดยเฉพาะ กทำการเคลื่อนที่แบบระนาบขนาน จุดศูนย์กลางความเร็วขณะนั้นอยู่บนแกน ร.
2.แกนหมุนขนานกันทิศทางการหมุนอยู่ตรงข้าม (รูปที่ 56)
รูปที่.56
ในกรณีนี้ (ที่ ) แกนการหมุนชั่วขณะและจุดศูนย์กลางความเร็วชั่วขณะนั้นตั้งอยู่ด้านหลังเวกเตอร์ที่มีความเร็วเชิงมุมมากกว่าในระยะห่างเช่นนั้น (อีกครั้งโดยการเปรียบเทียบกับคำจำกัดความของผลลัพธ์ของแรงขนานกัน)
3.แกนการหมุนจะขนานกัน ทิศทางการหมุนจะตรงกันข้าม และความเร็วเชิงมุมจะเท่ากัน.
ความเร็วเชิงมุมของการเคลื่อนที่สัมบูรณ์ ดังนั้น ร่างกายจึงทำการเคลื่อนที่แบบแปลความหมาย คดีนี้เรียกว่า หมุนสองสามรอบโดยการเปรียบเทียบกับแรงคู่หนึ่ง
ตัวอย่างที่ 16รัศมีดิสก์ รหมุนรอบแกนนอนด้วยความเร็วเชิงมุม และแกนนี้หมุนรอบแกนตั้งร่วมกับกรอบ แกนคงที่ด้วยความเร็วเชิงมุม (รูปที่ 57)
รูปที่.57
แกนนอนคือแกนของการหมุนสัมพัทธ์ แกนแนวตั้ง – แกนของการหมุนแบบพกพา ดังนั้น เวกเตอร์ความเร็วเชิงมุมของพวกมันจึงถูกกำกับไปตามแกน และ
ความเร็วเชิงมุมสัมบูรณ์ และขนาด เนื่องจาก
ความเร็วชี้ กตัวอย่างเช่น สามารถพบได้หรือเป็นผลรวมของความเร็วแบบพกพาและความเร็วสัมพัทธ์: , โดยที่
หรือการเคลื่อนที่แบบสัมบูรณ์ โดยมีการหมุนรอบแกนชั่วขณะ ร, .
เวกเตอร์ความเร็วจะอยู่ในระนาบที่ตั้งฉากกับเวกเตอร์และแกน ร.
ตัวอย่างที่ 17ผู้ให้บริการ โอเอโดยมีล้อ 2 และ 3 ติดตั้งอยู่ หมุนรอบแกน เกี่ยวกับด้วยความเร็วเชิงมุม ในกรณีนี้ ล้อที่ 2 จะกลิ้งไปเหนือล้อที่ 1 และจะทำให้ล้อที่ 3 หมุน ลองหาความเร็วเชิงมุมของล้อนี้ดู รัศมีล้อ (รูปที่ 58)
รูปที่.58
วงล้อที่ 3 เกี่ยวข้องกับการเคลื่อนไหวสองครั้ง หมุนโดยมีพาหะรอบแกน เกี่ยวกับและสัมพันธ์กับแกน แกน เกี่ยวกับจะเป็นแกนเคลื่อนที่ได้ แกนจะสัมพันธ์กัน ความเร็วเชิงมุมแบบพกพาของล้อ 3 คือความเร็วเชิงมุมของตัวพาที่พุ่งตามเข็มนาฬิกา เช่น
เพื่อกำหนดความเร็วเชิงมุมของการเคลื่อนที่สัมพัทธ์ ผู้สังเกตจะต้องอยู่บนพาหะ เขาจะเห็นพาหะหยุดนิ่ง ล้อที่ 1 หมุนทวนเข็มนาฬิกาด้วยความเร็ว (รูปที่ 59) และล้อที่ 3 หมุนด้วยความเร็วเชิงมุมสัมพัทธ์ ทวนเข็มนาฬิกา ตั้งแต่นั้นมา. แกนการหมุนจะขนานกัน ทิศทางการหมุนจะตรงกันข้าม ดังนั้นจึงมีทิศทางเดียวกับทวนเข็มนาฬิกา โดยเฉพาะถ้า แล้ว วงล้อที่ 3 ก็จะเคลื่อนไปข้างหน้า
รูปที่.59
การศึกษาการเคลื่อนที่ของโครงสร้างอื่นที่คล้ายคลึงกัน (กระปุกเกียร์ดาวเคราะห์และเฟืองท้าย, เกียร์) ดำเนินการในลักษณะเดียวกัน
ความเร็วเชิงมุมแบบพกพาคือความเร็วเชิงมุมของพาหะ (เฟรม กากบาท ฯลฯ) และเพื่อที่จะกำหนดความเร็วสัมพัทธ์ของล้อใดๆ คุณจะต้องหยุดตัวพาหะ และบังคับให้ล้อที่อยู่นิ่งหมุนด้วยความเร็วเชิงมุม ของตัวพาแต่ไปในทิศทางตรงกันข้าม
ความเร่งเชิงมุมของวัตถุในการเคลื่อนที่แบบสัมบูรณ์สามารถหาได้เป็นอนุพันธ์ โดยที่ ให้เราแสดง (รูปที่ 60) เวกเตอร์หน่วย และ (หรือเวกเตอร์ของแกน และ ) และเขียนเวกเตอร์ความเร็วเชิงมุมดังนี้: , . และ เป็นความเร็วของจุดสิ้นสุดของเวกเตอร์ โมดูลัสของการเร่งความเร็วเชิงมุมเพิ่มเติม โดยที่ คือมุมระหว่างแกน
แน่นอน ถ้าแกนหมุนขนานกัน ก็จะเป็นเช่นนี้ ความเร่งเชิงมุมจะเท่ากับศูนย์เนื่องจาก
1. การเพิ่มการหมุนรอบแกนที่ตัดกันปล่อยให้วัตถุแข็งเกร็งมีส่วนร่วมพร้อมกันในการหมุนสองครั้ง: เคลื่อนที่ได้ด้วยความเร็วเชิงมุมและสัมพันธ์กับความเร็วเชิงมุม แกนการหมุนตัดกันที่จุด O (รูปที่ 49.a)
ตัวอย่างของวัตถุที่มีส่วนร่วมในการหมุนสองครั้งเกี่ยวกับแกนที่ตัดกันคือดิสก์ เอ,ติดตั้งอย่างหลวม ๆ บนเพลา อู๋"และหมุนไปรอบๆ ด้วยความเร็วเชิงมุม พร้อมด้วยเพลา อู๋"ดิสก์ยังคงหมุนไปรอบอื่น
แกน โอ 1 โอ 2(รูปที่ 49.b) ด้วยความเร็วเชิงมุม
ตามทฤษฎีบทเรื่องการบวกความเร็วของจุดหนึ่ง มเรามี
เนื่องจากการเคลื่อนที่เชิงแปลและการเคลื่อนที่สัมพัทธ์เป็นการหมุนรอบแกน ดังนั้น
ที่ไหน ชั่วโมง 1และ ชม. 2 - ระยะทางที่สั้นที่สุดจากจุดหนึ่ง มไปยังแกนการหมุนที่สอดคล้องกัน พื้นที่ของสามเหลี่ยมในรูปสี่เหลี่ยมด้านขนานจึงเท่ากัน ดังนั้น
ด้วยการเพิ่มการหมุนสองครั้งรอบแกนที่ตัดกัน ซึ่งหนึ่งในนั้นเป็นแบบเคลื่อนที่ได้และอีกแบบสัมพันธ์กัน ผลลัพธ์ที่ได้คือการหมุนของร่างกายรอบแกนชั่วขณะ
ในการหาความเร็วเชิงมุมสัมบูรณ์ของการหมุนรอบแกนชั่วขณะ ให้เลือกจุดบนตัวเครื่อง เอ็นและคำนวณความเร็วครั้งหนึ่งเป็นความเร็วของการเคลื่อนที่เชิงซ้อน และอีกอันเป็นการหมุนรอบแกนชั่วขณะ ตามสูตรของออยเลอร์สำหรับการเคลื่อนที่แบบหมุนในการเคลื่อนที่เชิงซ้อนเรามี
สำหรับการหมุนสัมบูรณ์รอบแกนชั่วขณะ
เราได้รับความเร็วเท่ากัน
เช่น. ความเร็วเชิงมุมของการหมุนแบบสัมบูรณ์เท่ากับผลรวมเวกเตอร์ของความเร็วเชิงมุมของการหมุนส่วนประกอบ
2. การเพิ่มการหมุนรอบแกนขนานมีสามกรณีที่ต้องพิจารณา
1) การหมุนมีทิศทางเดียวกัน- ร่างกายมีส่วนร่วมในการหมุนสองรอบ: เคลื่อนที่ได้ด้วยความเร็วเชิงมุมและสัมพันธ์กับความเร็วเชิงมุม (รูปที่ 50) บนส่วน เอบีร่างกายในขณะนี้อยู่ระหว่างการพิจารณามีจุด C ซึ่งมีความเร็วเป็นศูนย์ ตามทฤษฎีบทการบวกความเร็วของจุด C ที่เรามี
ความเร็วของจุด C จะเป็นศูนย์ ถ้า แต่ , . เพราะฉะนั้น,
เพื่อกำหนดความเร็วเชิงมุมของการหมุนของร่างกายรอบแกนชั่วขณะเราจะคำนวณความเร็วของจุด ใน,เมื่อพิจารณาถึงการเคลื่อนไหวของเธอได้ยาก เราได้รับ
เพราะฉะนั้น,
สำหรับความเร็วจุด ในเมื่อร่างกายหมุนรอบแกนชั่วขณะเราก็มี
การเทียบความเร็วของจุด ใน,เรามีสองวิธี
ตาม (*),
สูตร (*) สามารถแสดงได้ดังนี้:
เราสร้างสัดส่วนอนุพันธ์และใช้สูตร (**)
ดังนั้น, เมื่อเพิ่มการหมุนของวัตถุสองครั้งรอบแกนขนานในทิศทางเดียวกัน จะได้การหมุนรอบแกนขนานในทิศทางเดียวกันกับ ความเร็วเชิงมุมเท่ากับผลรวมของความเร็วเชิงมุมของการหมุนส่วนประกอบ แกนทันทีของการหมุนที่เกิดขึ้นจะแบ่งส่วนนั้น
ระหว่างแกนของการหมุนส่วนประกอบเป็นส่วนต่างๆ แปรผกผันกับความเร็วเชิงมุมของการหมุนเหล่านี้ในลักษณะภายใน
2) การหมุนมีทิศทางตรงกันข้ามลองพิจารณากรณีเมื่อ . เราได้รับสูตรต่อไปนี้:
ดังนั้น, เมื่อเพิ่มการหมุนของวัตถุแข็งเกร็งสองครั้งรอบแกนขนานในทิศทางตรงกันข้าม จะได้การหมุนรอบแกนขนานกับ ความเร็วเชิงมุม เท่ากับความแตกต่างในความเร็วเชิงมุมของส่วนประกอบของการหมุนในทิศทางของการหมุนกับ ความเร็วเชิงมุมที่สูงขึ้น แกนของการหมุนแบบสัมบูรณ์จะแบ่งส่วนระหว่างแกนของการหมุนส่วนประกอบออกเป็นส่วนต่างๆ ที่เป็นสัดส่วนผกผันกับความเร็วเชิงมุมของการหมุนเหล่านี้ภายใน
3. หมุนสองสามรอบการหมุนคู่คือการรวมกันของการหมุนสองครั้งของวัตถุแข็งเกร็งทั้งแบบพกพาและแบบสัมพันธ์รอบแกนขนานที่มีความเร็วเชิงมุมเท่ากันในทิศทางตรงกันข้าม (รูปที่ 52 ).
ในกรณีนี้ เมื่อพิจารณาการเคลื่อนที่ของวัตถุว่าซับซ้อนตามทฤษฎีบทบวกความเร็วของจุดหนึ่ง มเรามี
การแทนที่ (~) ในสูตรด้วย เราจะได้ตามนั้น
เมื่อรวมผลลัพธ์แล้วเราก็ได้
ดังนั้น, ถ้าวัตถุแข็งเกร็งมีส่วนร่วมในการหมุนคู่หนึ่ง ดังนั้นความเร็วของทุกจุดของร่างกายตาม(~~), เหมือนกัน กล่าวคือ ร่างกายทำการเคลื่อนไหวแปลทันที
ลองพิจารณากรณีที่การเคลื่อนที่สัมพัทธ์ของร่างกายคือการหมุนด้วยความเร็วเชิงมุมรอบแกนที่คงที่บนข้อเหวี่ยง (รูปที่ 198, a) และการเคลื่อนที่แบบพกพาคือการหมุนของข้อเหวี่ยงรอบแกนขนานกับความเร็วเชิงมุม การเคลื่อนที่ของร่างกายจะขนานกับระนาบที่ตั้งฉากกับแกน เป็นไปได้สามกรณีพิเศษที่นี่
1. การหมุนมีทิศทางในทิศทางเดียว ให้เราพรรณนาถึงส่วน S ของร่างกายด้วยระนาบตั้งฉากกับแกน (รูปที่ 198, b) เราแสดงร่องรอยของแกนในส่วนที่ 5 ด้วยตัวอักษร A และ B จะเห็นว่าจุด A ซึ่งวางอยู่บนแกนนั้นได้รับความเร็วจากการหมุนรอบแกน Bb เท่านั้น ดังนั้นในลักษณะเดียวกัน

ในกรณีนี้ เวกเตอร์จะขนานกัน (ทั้งคู่ตั้งฉากกับ AB) และมีทิศทางไปในทิศทางที่ต่างกัน จากนั้นจุด C (ดู§ 56, รูปที่ 153, b) เป็นจุดศูนย์กลางความเร็วชั่วขณะ ดังนั้น แกนที่ขนานกับแกนและ Bb จึงเป็นแกนการหมุนวัตถุชั่วขณะ
ในการหาความเร็วเชิงมุม c ของการหมุนสัมบูรณ์ของร่างกายรอบแกนและตำแหน่งของแกนเอง เช่น จุด C เราใช้ความเท่าเทียมกัน [ดู § 56 สูตร (57)]
ผลลัพธ์สุดท้ายมาจากคุณสมบัติของสัดส่วน ในที่สุดเราก็พบการแทนที่ความเท่าเทียมกันเหล่านี้:
![]()
ดังนั้น หากวัตถุมีส่วนร่วมในการหมุนสองครั้งพร้อมกันในทิศทางเดียวกันรอบแกนขนาน ผลลัพธ์การเคลื่อนที่จะเป็นการหมุนทันทีด้วยความเร็วเชิงมุมสัมบูรณ์รอบแกนชั่วขณะขนานกับข้อมูล ตำแหน่งของแกนนี้ถูกกำหนดโดยสัดส่วน (98)
เมื่อเวลาผ่านไป แกนหมุนทันทีจะเปลี่ยนตำแหน่งโดยอธิบายพื้นผิวทรงกระบอก
2. การหมุนมีทิศทางไปในทิศทางที่ต่างกัน ขอให้เราพรรณนาถึงส่วน S ของร่างกายอีกครั้ง (รูปที่ 199) และสมมุติว่า sсoz นั้นแน่นอน จากนั้น เมื่อให้เหตุผลเหมือนในกรณีก่อนหน้านี้ เราพบว่าความเร็วของจุด A และ B จะเท่ากันในเชิงตัวเลข ในเวลาเดียวกัน พวกเขาจะขนานกันและมุ่งไปในทิศทางเดียวกัน
จากนั้นแกนหมุนทันทีจะผ่านจุด C (รูปที่ 199) และ
ผลลัพธ์สุดท้ายก็มาจากคุณสมบัติของสัดส่วนด้วย ในที่สุดเราก็พบการแทนที่ค่าลงในความเท่าเทียมกันเหล่านี้:
![]()
ดังนั้น ในกรณีนี้ การเคลื่อนที่ที่เกิดขึ้นจะเป็นการหมุนทันทีด้วยความเร็วเชิงมุมสัมบูรณ์รอบแกนซึ่งตำแหน่งถูกกำหนดโดยสัดส่วน (100)
3. หมุนสองสามรอบ ลองพิจารณากรณีพิเศษเมื่อการหมุนรอบแกนขนานมีทิศทางต่างกัน (รูปที่ 200) แต่เป็นแบบโมดูโล .


ชุดการหมุนดังกล่าวเรียกว่าการหมุนคู่หนึ่ง และเวกเตอร์จะประกอบกันเป็นคู่ของความเร็วเชิงมุม ในกรณีนี้ เราจะได้ จากนั้น (ดูมาตรา 56 รูปที่ 153, ก) จุดศูนย์กลางความเร็วชั่วขณะนั้นอยู่ที่อนันต์ และจุดทั้งหมดของร่างกายในช่วงเวลาที่กำหนดจะมีความเร็วเท่ากัน
ดังนั้น การเคลื่อนที่ที่เกิดขึ้นของวัตถุจะเป็นการเคลื่อนที่แบบแปลความหมาย (หรือแบบแปลทันที) ด้วยความเร็วในเชิงตัวเลขและตั้งฉากกับระนาบที่ผ่านเวกเตอร์ ทิศทางของเวกเตอร์ v ถูกกำหนดในลักษณะเดียวกับในสถิตยศาสตร์ กำหนดทิศทางของโมเมนต์ของแรงคู่หนึ่ง (ดูมาตรา 9) กล่าวอีกนัยหนึ่ง การหมุนคู่หนึ่งเทียบเท่ากับการเคลื่อนที่เชิงแปล (หรือการแปลทันที) โดยมีความเร็ว v เท่ากับโมเมนต์ของความเร็วเชิงมุมคู่หนึ่งของการหมุนเหล่านี้